Dear Elham, we can send you the Inline camera but the waterproof case is not going to be ready. It will take several weeks to machine some parts that can not be 3D-printed, after the design is finished. We can sponsor this project provided that your software is free and open source and all documentation is available on Github or similar repository. It would be also nice if you can write an article on Elphel blog about your project, like other sponsored clients did: http://blog.elphel.com/category/success-story/
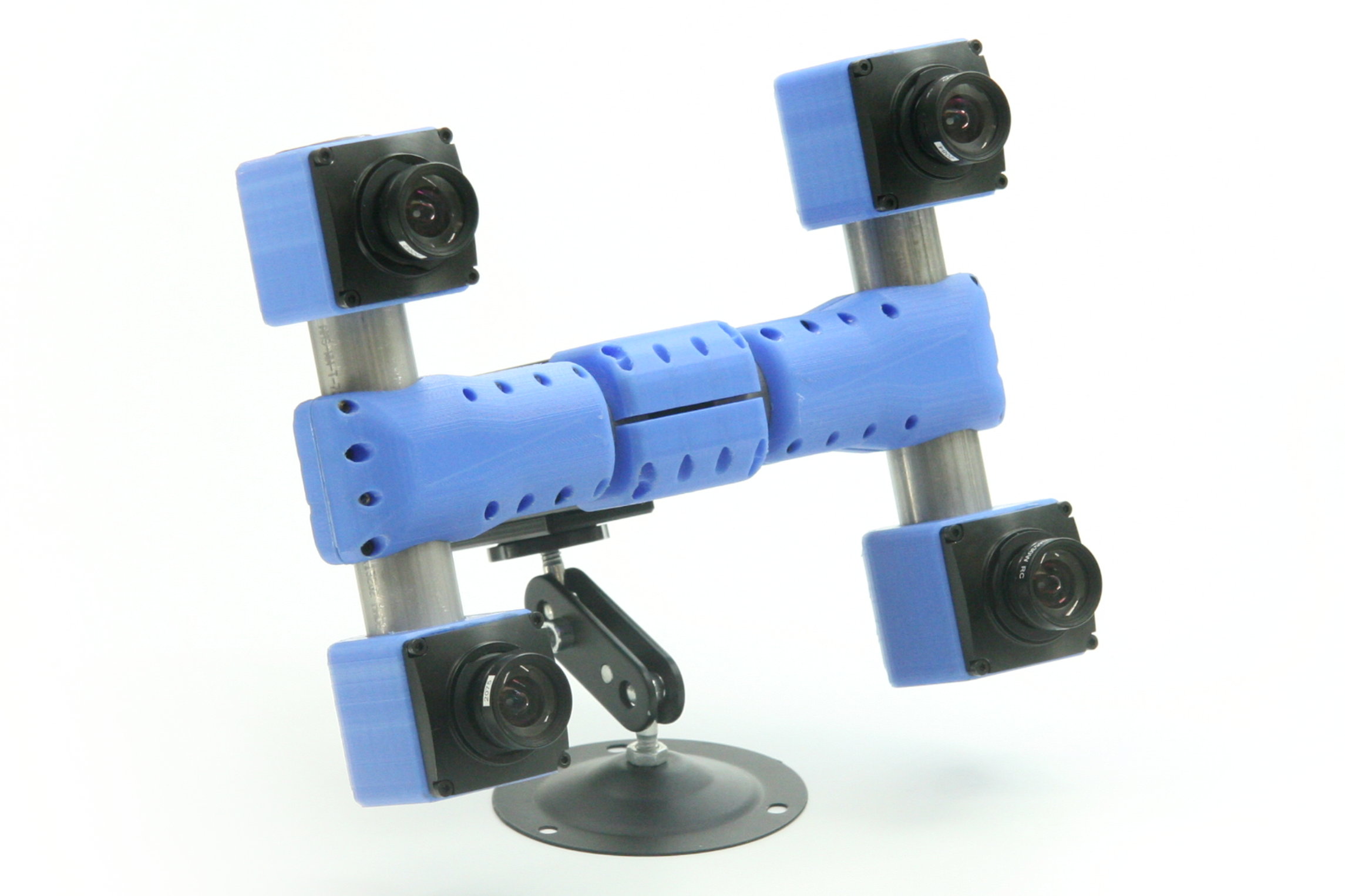
Best Regards, Olga On Sat, Sep 3, 2016 at 8:41 AM, Elham Omrani <elh.omr...@yahoo.com> wrote: > Dear Andrey, > Thank you. You’re so helpful. I apologize for late reply.The robot is an > industrial type that will be used in outdoor conditions. There fore, it is > very important to detect obstacles with high accuracy since the accuracy > parameter is more critical than ambiguity. In addition, we must finish > this project in the next month and we don't have enough time to code new > software. > According to above statements, we prefer to use Inline model. > I hope we use H-model in future projects. > what is difference of 2 stereo cameras(that has 4 lenses) with a 4 lenses > stereo system? > I'm hurry in my project please quote as soon as possible. > I looking forward hearing from you. > Best Regards > Elham > > > > > > On Tuesday, August 30, 2016 12:41 AM, Elphel Support < > support-list@support.elphel.com> wrote: > > > Elpham, > > Using dual 2-lens system does not give you any advantage compared to two > separate systems, and for research project I would rather use 2 separate, > for simplicity. > > You know that there are many ways to process multi-view images, most use > feature extraction and keypoints before calculating disparity and so the > distance. > > Alternatively you can start from correlation (in most cases a > superposition of the correlation and phase correlation) of the (usually > just 2) images trying to get distance to objects that do not have easily > identifiable feature but still have many high-frequency components. > > Both paths have some advantages and disadvantages, correlation provides > better Z-resolution (you can easily operate with disparities being a small > fraction of a pixel - like 0.1), but it is easy to get into ambiguous > results, especially when the objects have some periodic structures. > > Using more than 2 view simultaneously can reduce ambiguity significantly, > and finally get high precision distance measurements before the image is > analyzed for feature extraction. Right now we do not have this code in > FPGA, but it is one of our close targets that we'll work on when the base > software for the cameras will be finished, so correlation will be done at > "hardware" speeds in the same NC393-based cameras running new code. > Meanwhile you could post-process images on a regular PC. > > I've seen much less works on the distance measurements with multiple-view > systems compared to the standard 2-sensor systems, so that would give you > an opportunity to do an interesting research. > > You could play (just online or download sources for analysis) with our > "triclops" images that are linked on our web site to get an idea of the > advantage of the multiple view systems. > > Andrey > > > ---- On Mon, 29 Aug 2016 12:27:28 -0700 *Elham > Omrani<elh.omr...@yahoo.com <elh.omr...@yahoo.com>>* wrote ---- > > Dear Olga, > Thank you for providing the requested information. Yes, we want to use > Inline camera as 2 stereo cameras. Inner lenses are a stereo vision system > with smaller baseline and focal length (suitable for near distance) and > outer lenses are a stereo system with bigger baseline and focal length (for > far distance). As you know, stereo vision error increases with increasing > distance. Because of this, researchers uses 2 stereo camera in a unified > system to decrease disparity error. > If you use same baseline and focal lenses, What is your purpose of > designing H- model or inline model with same baseline and focal lenses? > About lens, In addition to 4.5 mm lens, what lens do you recommend (we > prefer bigger than 4.5 focal lens)? > I'm looking forward hearing from you. > Elham > > > > On Monday, August 29, 2016 9:53 PM, Olga Filippova < > support-list@support.elphel.com> wrote: > > > Dear Elham, > > can you please explain the technical reasons for ordering inline camera? > It looks like you plan to use Inline camera as 2 stereo cameras with 2 > different bases. This is fine, but it has been done before, while the > H-camera presents interesting research opportunities. > > Practically speaking we offer 4.5mm lenses (custom adjustment has been > made to fit this lens to the camera, using 3 different adapter rings, as > can be seen here: http://www3.elphel.com/importw > iki?title=File:N125B04530W_adapter.jpeg) But we do not offer any 9 mm > lenses - we have not tested any of 9mm lenses and we don't have these in > stock, however you are welcome to purchase such lenses separately and > install them on the camera. > > I am researching the exporting regulations to Iran. I think we can ship > our camera products to Iran, but I need to receive answers from the > exporting agency, to make sure. > > We offer standard 48V power supply that converts AC power from wall outlet > to 48V DC power. The camera uses 3.3V, but the power supply has to be > minimum 12V, or 18V better, especially for camera with 4 image sensors. You > can power the camera from the boat power supply. For development it is nice > to have a wall adapter, like the 48 V AC-DC converter we offer (or you can > use the one you already have or can purchase locally). > > Best Regards, > > > On Sun, Aug 28, 2016 at 12:55 AM, Elham Omrani <elh.omr...@yahoo.com> > wrote: > > Hello Olga, > Thank you for your attention to this matter. Yes, I remember, but > Contrary to my opinion, my supervisor emphasis on purchasing Inline model. > Therefore we decide to order inline model. so please quote for *inline > model*, with 22 cm inner baseline(for inner lenses ) with 4.5 mm lens, and > 44 cm outer baseline with 9 mm lens. > We want to ship the camera to Iran. Do you send the camera with DHL post? > According to your website, the required power for the 10393 system board > is 3.3 VDC (http://wiki.elphel.com/index. php?title=10393 > <http://wiki.elphel.com/index.php?title=10393>) and Why do you use 48 v power > supply ? what is required power for the camera? we have 12 VDC and 20-30 > VDC(variable) on our robot, is it suitable for the camera? or we must > purchase 48 v power supply ? > I'm looking forward hearing from you. > Elham > > > On Wednesday, August 3, 2016 1:44 AM, support-list > <support-list@support.elphel. > com <support-list@support.elphel.com>> wrote: > > > Dear Elham, > > Elphel is a small company, and all our funds come from the product sales - > we do not use any government funding, private investments or crowdfunding. > Our margin is lower than 50%, so such discount means that we already pay > more for the components than receive for the camera sale. > > That is OK, we do sometimes donate to interesting projects, but right now > we are still in the process of upgrading to the new line of the cameras, > that involves rather expensive R&D that does not pay back immediately. We > use now all the available resources to shorten the transition time, it is > going well so far, but still there is work to be done. > > We may consider donating to interesting projects in the future, but right > now it is all what we can afford to offer. > > As for the brochure - we do not yet have any for the new camera, all the > information we have ourselves is posted online. Code is on Github ( > https://github.com/Elphel), more information on our wiki > (http://wiki.elphel.com/index. > php?title=10393 <http://wiki.elphel.com/index.php?title=10393> , > http://wiki.elphel.com/index. > php?title=Poky_2.0_manual > <http://wiki.elphel.com/index.php?title=Poky_2.0_manual>, ) more picture > in the blog post - http://blog.elphel.com/2016/ 05/3d-print-your-camera- > freedom/ <http://blog.elphel.com/2016/05/3d-print-your-camera-freedom/> > > Here - http://wiki.elphel.com/index. php?title=Elphel_camera_ assemblies > <http://wiki.elphel.com/index.php?title=Elphel_camera_assemblies> (the > link is on our home page) you can take our camera apart and look at each > component (all components have CAD files on our wiki - files you can use to > build the parts). > > Andrey > > ---- On Tue, 02 Aug 2016 08:15:32 -0700 *Elham Omrani > <elh.omr...@yahoo.com <elh.omr...@yahoo.com>>* wrote ---- > > Dear Andrey, > Thank you for your excellent suggestion. we will be very happy if you > contribute in this project. could you please raise the percent of your > sponsorship? furthermore, is it possible to send us the NC393-H brochure? > we are sincerely grateful for your contribution > Elham > > > > > Dear Elham, > > Your project seems very interesting. We can sponsor 50% of the cost of > the NC393-H for your team and provide additional technical support. Will > the result of your research be open for others to reproduce? > > Andrey > > ---- On Mon, 01 Aug 2016 01:27:18 -0700 *Elham Omrani > <elh.omr...@yahoo.com <elh.omr...@yahoo.com>>* wrote ---- > > Dear Andrey > I'm PhD student and in my thesis is "*Implementation of stereo vision > system for obstacle detection in solar boat"* > this is my website:http://emorvarid.ut.ac.ir/Members.htm > > Elham > On Monday, August 1, 2016 11:27 AM, support-list <support-list@support.elphel. > com <support-list@support.elphel.com>> wrote: > > > Dear Elham, > > What kind of project is it ? Is it a personal, commercial, student/Ph.D > research, something else? We did sponsor some interesting projects before > and we plan to resume it with the new cameras starting this Fall. > > Andrey > > ---- On Sun, 31 Jul 2016 23:29:40 -0700 *Elham > Omrani<elh.omr...@yahoo.com <elh.omr...@yahoo.com>>* wrote ---- > > Dear Andrey, > Thank you for good guidance and suggestion. in your website, you have > explained that this camera can be develop by c++ and opencv is one of c++ > libraries. > NC393-H camera is very expensive for me. > Sinserly > Elham > > > On Monday, August 1, 2016 10:32 AM, support-list <support-list@support.elphel. > com <support-list@support.elphel.com>> wrote: > > > Dear Elham, > > The most flexible solution will be something like this - > http://blog.elphel.com/wp- > content/uploads/2016/05/nc- 393-printed-H-.jpeg > <http://blog.elphel.com/wp-content/uploads/2016/05/nc-393-printed-H-.jpeg> > , you will be able to change configuration if you'll need to. > > You can run opencv in the camera (not possible in the older NC353), but it > will not be probably fast enough. On the other hand we plan to add more > configurable image correlation processing into the FPGA (here id the block > diagram of the current FPGA code), so you will be able to start with the > external computer processing and later (probably in a year) to do some > correlation in the camera in real time. > > Andrey > > > > ---- On Sun, 31 Jul 2016 22:37:44 -0700 *Elham > Omrani<elh.omr...@yahoo.com <elh.omr...@yahoo.com>>* wrote ---- > > Dear Andrey, > Thanks for your good reply. > My project is navigation and obstacle avoidance of a boat in outdoor. so I > want to help me in choosing proper stereo camera. > We want to use Opencv program. > Yes, this program can use color or monochrome images. > Sinserly > Elham > > > On Monday, August 1, 2016 9:50 AM, support-list <support-list@support.elphel. > com <support-list@support.elphel.com>> wrote: > > > Dear Elpham, > > There are many other issues that need to be considered when you select > configuration of the stereo camera > What type of objects you need to measure, their angular size > What resolution do you need - angular and in distance > What software are you going to use - what kinds of lens distortions it can > tolerate/compensate? > Does this software use color or monochrome images? > And many more > > I would also recommend trying more than just 2 sensors - our experience > indicates that it is much easier to avoid ambiguity before doing any > feature extraction by just combining 3 or 4 images instead of 2. > > Andrey > > > > ---- On Sun, 31 Jul 2016 22:03:09 -0700 *Elham > Omrani<elh.omr...@yahoo.com <elh.omr...@yahoo.com>>* wrote ---- > > Dear Andrey, > > Thank you for your kindly answering and suggestion. I think NC353 camera > with 5MPix resolution is enough for me(because of high speed of algorithm) > . > in my project i need to see the depth of 50 meters(max).In your opinion is > it possible? And the parameters of focal length and angle of view in what > range should be? > Elham > > > > > ______________________________ _________________ > Support-list mailing list > Support-list@support.elphel. com <Support-list@support.elphel.com> > http://support.elphel.com/ mailman/listinfo/support-list_ > support.elphel.com > <http://support.elphel.com/mailman/listinfo/support-list_support.elphel.com> > > > > > > ______________________________ _________________ > Support-list mailing list > Support-list@support.elphel. com <Support-list@support.elphel.com> > http://support.elphel.com/ mailman/listinfo/support-list_ > support.elphel.com > <http://support.elphel.com/mailman/listinfo/support-list_support.elphel.com> > > > > > > ______________________________ _________________ > Support-list mailing list > Support-list@support.elphel. com <Support-list@support.elphel.com> > http://support.elphel.com/ mailman/listinfo/support-list_ > support.elphel.com > <http://support.elphel.com/mailman/listinfo/support-list_support.elphel.com> > > > > > > ______________________________ _________________ > Support-list mailing list > Support-list@support.elphel. com <Support-list@support.elphel.com> > http://support.elphel.com/ mailman/listinfo/support-list_ > support.elphel.com > <http://support.elphel.com/mailman/listinfo/support-list_support.elphel.com> > > > > > > > ______________________________ _________________ > Support-list mailing list > Support-list@support.elphel. com <Support-list@support.elphel.com> > http://support.elphel.com/ mailman/listinfo/support-list_ > support.elphel.com > <http://support.elphel.com/mailman/listinfo/support-list_support.elphel.com> > > > > > _______________________________________________ > Support-list mailing list > Support-list@support.elphel.com > http://support.elphel.com/mailman/listinfo/support-list_support.elphel.com > > > > > > > _______________________________________________ > Support-list mailing list > Support-list@support.elphel.com > http://support.elphel.com/mailman/listinfo/support-list_support.elphel.com > >
{kind=link}
_______________________________________________ Support-list mailing list Support-list@support.elphel.com http://support.elphel.com/mailman/listinfo/support-list_support.elphel.com