In order to build a sampler, I use a stepper motor to move a tray along a linear rail. I'm using a NEMA 17 size motor with a step angle of 1.8° and a peak current of 1.68A/phase. The stepper motor and the driver are mounted as follows:
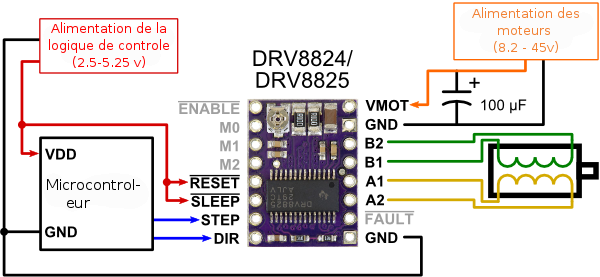
<https://wiki.mchobby.be/images/c/cf/STEPSTK-DRV8825-WIRE_01.png> I also set the current limit to 1.0 using the formula: Current Limit = VREF x 2 x 70% (for full step mode) Finally, my motor connection is as follows: (after checking the pairs with a multimeter) B2 : blue ; B1: red ; A1: green ; A2: black. My problem : -> all the connections seem ok but my stepper motor makes an abnormal strident noise as soon as I feed it... -> when the power is on, its impossible to turn the motor by hand -> during my first tests with the stepper motor( 1 week ago), he responded well to the code (despite the shrill noise). But today he doesnt answer at all. I think the condition of the motor is getting worse as I test it. #import Arduino library from bbio import * #Define pins stepPin = GPIO2_3 dirPin = GPIO2_4 #Set the pins as output def setup(): pinMode(stepPin, OUTPUT) pinMode(dirPin, OUTPUT) def loop(): digitalWrite(dirPin, HIGH) for i in xrange(0,200,2): digitalWrite(stepPin, HIGH) delayMicroseconds(500) digitalWrite(stepPin, LOW) delayMicroseconds(500) delay(1000) run(setup, loop) Has anyone ever used this driver to control the stepper motor? I said that I already tried to control it with an EasyDriver but my stepper motor needs a minimum current of 1 to 1.2A to activate the coils (easydriver: max 0.75A continuously or otherwise 0.85A). -- For more options, visit http://beagleboard.org/discuss --- You received this message because you are subscribed to the Google Groups "BeagleBoard" group. To unsubscribe from this group and stop receiving emails from it, send an email to [email protected]. To view this discussion on the web visit https://groups.google.com/d/msgid/beagleboard/3bc710ad-4a7c-43dc-bc84-9fba5e6262a5%40googlegroups.com.
{kind=link}