This a very nice script, but be adviced that llcastray can only sense a objects bounding box and so will get what apears to be false hits if you put a path through a hollowed prim and will not sense the walls inside the hollow. On Nov 19, 2013 12:53 PM, "Jeff Kelley" <[email protected]> wrote:
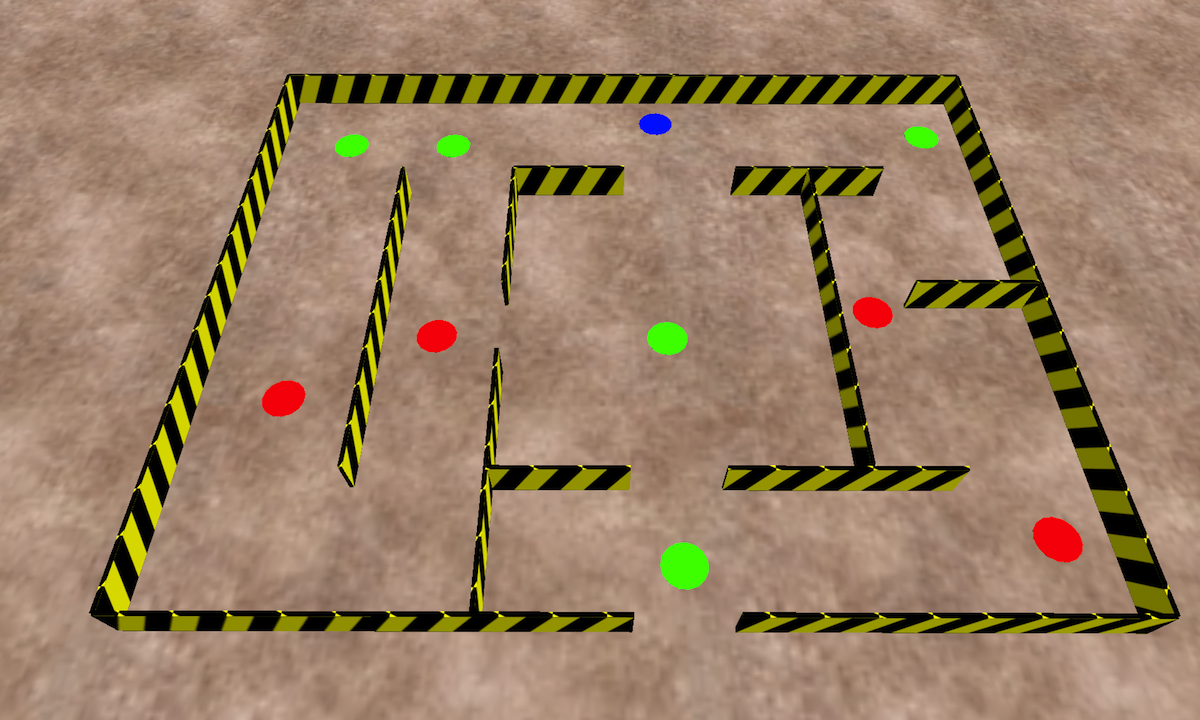
> As you may have noticed, since 0.7.6 llCastRay is now functional. We can > think about helping our NPC to find their way in a closed environment. > > This method relies on marker prims, or beacons, defining waypoints. The > following script computes the connexity matrix between a set of waypoints. > A one in [ i,j ] means there is a direct path from i to j. > > Build some walls on a flat ground. At corners and intersections, lay a > number a thin prims named wp1, wp2 and so on. Their altitude should be > higher than or equal to the wall's base, so that rays casted between two > waypoints will hit the walls. Here is a picture of my test rig: > http://www.pescadoo.net/tmp/NPC_maze.png > > It is advised to allow osSetPrimitiveParams. We'll get a nice demo for the > price. Let's now browse the code. > > First, we sense the waypoints. We iterate on llSense, incrementing the > index until we get a no_sensor event. The waypoints names, locations and > keys are stored in a strided list. > > Then, we compute the matrix calling llCastRay for each couple of > waypoints. We analyse the hits and declare the two waypoints are connex if > we hit any object whose name IS NOT "wp*". This rule may be refined (using > the object's height, volume, or some more sophisticated rule depending on > the environment, a rug should no count as a wall). As the matrix is > symmetric, we compute only a half-matrix and fill the transposed cells with > the same value. We also fill the diagonal with ones. The matrix is stored > as a string a '0' and '1', with pseudo-array accessors. > > Finally, we enter a listening state. Saying "wp3" will highlight waypoint > 3 in blue, and all connex waypoints in green (that's why we need > osSetPrimitiveParams).That's the point your NPC can reach without bumping > into the walls. Unreachable waypoints are colored red. > > The script stops here for today. You guess it, the next step is to find a > path from waypoint A to waypoint B. A classical graph theory exercise, the > " transitive closure". I assume you know how to make a NPC move from point > A to point B. > > Have fun! > > > > > DEBUG (string msg) { llOwnerSay (msg); } > PRINT (string msg) { llSay (0, msg); } > > // > // Waypoints list and accessors > // > > list WayPoints; // Strided list (name, location, key) > > string WPnam (integer i) { return llList2String (WayPoints, 3*i+0); } > vector WPLoc (integer i) { return llList2String (WayPoints, 3*i+1); } > key WPKey (integer i) { return llList2Key (WayPoints, 3*i+2); } > integer WPnumber () { return llGetListLength (WayPoints) / 3; } > > integer FindWP (string name) { > integer i = llListFindList (WayPoints, [name]); > if (i== -1) return i; > else return i/3; > } > > > // > // Connexity matrix and accessors > // > > string Matrix; // Matrix NxN of booleans implemented as string of 0/1 > > MatrixNew (integer size) { > integer n=0; for (n=0; n<size*size; n++) > Matrix += "0"; > } > > MatrixSet (integer i, integer j, integer value) { > integer size = (integer)llSqrt(llStringLength (Matrix)); > integer index = i*size+j; > Matrix = llDeleteSubString (Matrix, index, index); > Matrix = llInsertString (Matrix, index, (string)value); > } > > integer MatrixGet (integer i, integer j) { > integer size = (integer)llSqrt(llStringLength (Matrix)); > integer index = i*size+j; > return (integer)llGetSubString (Matrix, index, index); > } > > MatrixPrint () { > integer size = (integer)llSqrt(llStringLength (Matrix)); > integer n=0; for (n=0; n<size; n++) { > PRINT (llGetSubString(Matrix, n*size, n*size+size-1)); > } > } > > > // > // Colors, osFunctions to change color by ID > // > > vector RED = <1.0, 0.0, 0.0>; > vector GREEN = <0.0, 1.0, 0.0>; > vector BLUE = <0.0, 0.0, 1.0>; > vector BLACK = <0.0, 0.0, 0.0>; > vector GREY = <0.5, 0.5, 0.5>; > vector WHITE = <1.0, 1.0, 1.0>; > > > SetIDColor (key id, vector color) { > osSetPrimitiveParams(id, [PRIM_COLOR, ALL_SIDES, color, 1.0]); > } > > BlinkIDColor (key id, vector color) { > integer i; for (i=0; i<2; i++) { > osSetPrimitiveParams(id, [PRIM_COLOR, ALL_SIDES, color, 1.0]); > llSleep (0.1); > osSetPrimitiveParams(id, [PRIM_COLOR, ALL_SIDES, WHITE, 1.0]); > llSleep (0.1); > } > } > > ResetAll () { > integer i; for (i=0; i<WPnumber(); i++) > SetIDColor (WPKey(i), GREY); > } > > > // > // Waypoints sensing > // > > integer wpindex; // The current waypoint index > > SenseNext () { > string target = "wp"+(string)(++wpindex); > llSensor (target, "", PASSIVE, 200.0, PI); > } > > SenseDone (string theNam, key theKey, vector theLoc) { > if (theKey == NULL_KEY) state deux; > > DEBUG (theNam +" "+(string)theLoc); > WayPoints += [ theNam, theLoc, theKey ]; > SenseNext(); > } > > string Key2Name (key id) { > list dtls = llGetObjectDetails (id, [OBJECT_NAME]); > return llList2String (dtls, 0); > } > > float Key2Height (key id) { > list dtls = llGetObjectDetails (id, [OBJECT_POS]); > vector pos = llList2Vector (dtls, 0); > return pos.z; > } > > // > // Connexity test > // > > integer TestPath (integer wp1, integer wp2) { > string nam1 = WPnam(wp1); vector loc1 = WPLoc(wp1); key key1 = WPKey > (wp1); > string nam2 = WPnam(wp2); vector loc2 = WPLoc(wp2); key key2 = WPKey > (wp2); > > list hits = llCastRay (loc1, loc2, [RC_MAX_HITS,5]); > integer found = (llGetListLength(hits)-1) / 2; > integer status = llList2Integer(hits, -1); > > DEBUG (""); > DEBUG ("CastRay from " +nam1 +" to " +nam2 +", Hits/Status : " > +(string)found +" " +(string)status); > > integer numocclu = 0; > integer i; for (i=0; i<found; i++) { > key hitKey = llList2Key (hits, 2*i+0); > vector hitLoc = llList2Vector (hits, 2*i+1); > string hitNam = Key2Name (hitKey); > float hitHei = Key2Height (hitKey); > float hitDis = llVecDist (hitLoc, loc1); > > // Test d'occlusion. Ici, on se base sur le nom > // On peut se baser sur la hauteur mais ne pas > // utiliser hitLoc qui est le point d'interception > > integer occlusion = (llGetSubString(hitNam,0,1) != "wp"); > DEBUG ("["+(string)i+"] "+hitNam+" "+(string)hitHei+" > "+(string)occlusion); > if (occlusion) ++numocclu; > } > > // Waypoints are connex if zero occlusion > > integer connex = (numocclu == 0); > DEBUG (nam1 +" to " +nam2 +" : "+(string)connex); > return connex; > } > > > // > // Highlight connex waypoints > // > > ShowNeighbours (integer wp1) { > ResetAll (); > > key key1 = WPKey (wp1); > SetIDColor (key1, BLUE); > > integer wp2; for (wp2=0; wp2<WPnumber(); wp2++) { > integer reach = MatrixGet (wp1, wp2); > key key2 = WPKey (wp2); > if (wp1 != wp2) > if (reach) SetIDColor (key2, GREEN); > else SetIDColor (key2, RED); > } > } > > > /////////////////////////////////////////////////////// > // Step 1 : sense all waypoints and make a structure > /////////////////////////////////////////////////////// > > default { > > state_entry() { > PRINT ("Sensing waypoints"); > SenseNext(); > } > > sensor(integer num) { > key hisKey = llDetectedKey (0); > vector hisPos = llDetectedPos (0); > string hisNam = llDetectedName (0); > SenseDone (hisNam, hisKey, hisPos); > } > > no_sensor() { > SenseDone ("", NULL_KEY, ZERO_VECTOR); > } > > state_exit() { > PRINT ((string)WPnumber()+" found"); > } > > } > > /////////////////////////////////////////////////////// > // Step 2 : compute the connexity matrix > /////////////////////////////////////////////////////// > > state deux { > > state_entry() { > PRINT ("Computing Matrix"); > MatrixNew (WPnumber()); > > integer wp1; integer wp2; > for (wp1=0; wp1<WPnumber(); wp1++) > for (wp2=wp1+1; wp2<WPnumber(); wp2++) { > integer reach = TestPath (wp1, wp2); > MatrixSet (wp1, wp2, reach); > MatrixSet (wp2, wp1, reach); > MatrixSet (wp1, wp1, TRUE); > } > > MatrixPrint (); > state trois; > } > > } > > /////////////////////////////////////////////////////// > // Step 3 : listen for waypoint and highlight result > /////////////////////////////////////////////////////// > > state trois { > > state_entry() { > PRINT ("Listening to commands"); > llListen (0, "", llGetOwner(), ""); > } > > listen (integer channel, string name, key id, string message) { > integer wp = FindWP (message); > if (wp != -1) ShowNeighbours (wp); > } > > } > > > _______________________________________________ > Opensim-users mailing list > [email protected] > https://lists.berlios.de/mailman/listinfo/opensim-users >
{kind=link}
_______________________________________________ Opensim-users mailing list [email protected] https://lists.berlios.de/mailman/listinfo/opensim-users