Hi Tao, There are several ways how to do that: One method would be be to get camera sync pulses for each frame and use external electronics to match with the LIDAR. Another is to provide pulses from the LIDAR to the camera and record them with in-camera FPGA logger (https://wiki.elphel.com/wiki/Event_logger), together with the camera frames. In this case the camera will record 2 types of events: - image frames with the frame number, frame timestamp that will be recorded in each frame header as Exif. - external pulse Each of the two types of events will have a logger timestamp (with microsecond resolution). Logger can also record GPS timestamps (for serial GPS only and 103696 board -https://wiki.elphel.com/wiki/103696) and IMU (https://wiki.elphel.com/wiki/103695), in your case there are just 2 types listed above.
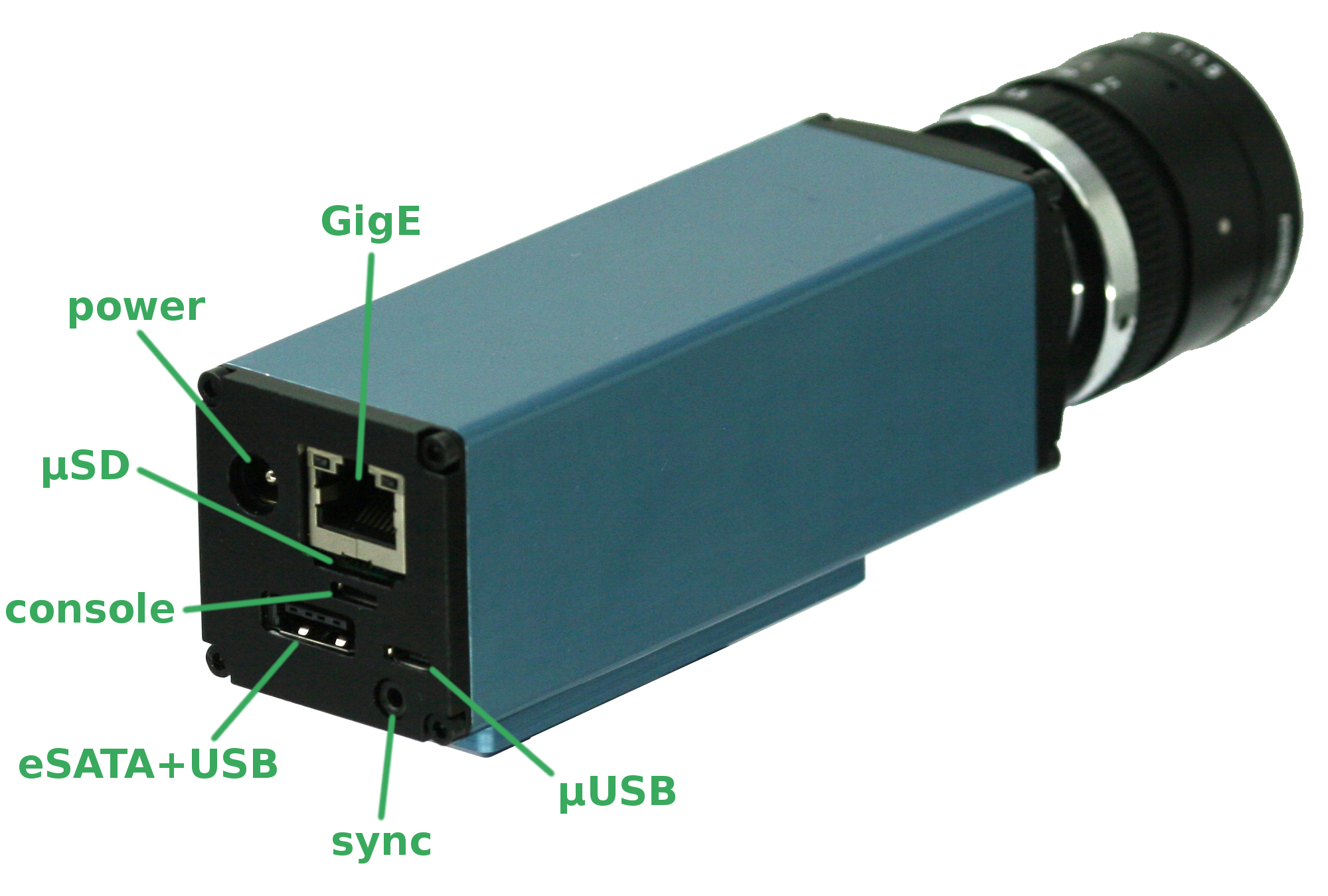
Both output (+5V pulses) and input (3.3V..5.0V) are available through the 2.5mm audio connector (marked "sync" https://wiki.elphel.com/images/0/0f/NC393-CS_marked_ports.jpeg ), here is the pinout and description: https://wiki.elphel.com/wiki/103891 . Andrey ---- On Wed, 31 Jan 2018 04:19:04 -0800 Tao Zhang<tao.zh...@blacksesame.com.cn> wrote ---- Hi Andrey, We are going to use stereo with lidar. We need to sync stereo frames with lidar point cloud. Do you have any suggestions on how to do that? Thanks. Tao Zhang 章 涛 _______________________________________________ Support-list mailing list Support-list@support.elphel.com http://support.elphel.com/mailman/listinfo/support-list_support.elphel.com
{kind=link}
_______________________________________________ Support-list mailing list Support-list@support.elphel.com http://support.elphel.com/mailman/listinfo/support-list_support.elphel.com