Charlie, I am not sure if this is your issue but, when I was working with an Adafruit GPS module, I ran into issues that came from noise on the power line. Perhaps your camera is doing something that requires is spike in current (like writing to an SD Card) and that noise is a second order effect.
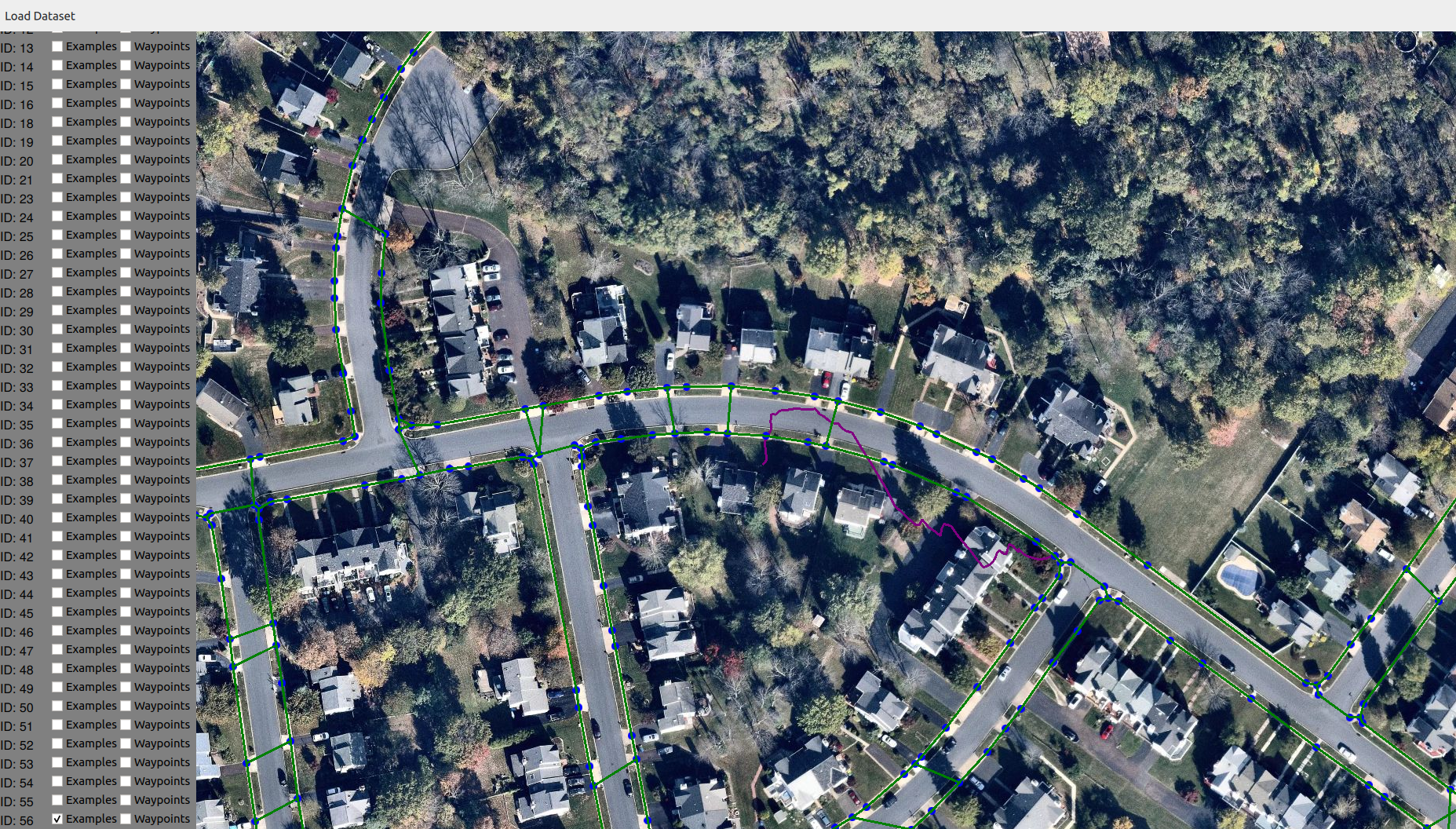
In my case, I added a regulator for the GPS breakout which fixed the issue. Other folks experiencing this issue on this thread. <https://forums.adafruit.com/viewtopic.php?f=19&t=51542&start=15> Good luck, Chip On April 30, 2019 at 6:50:40 PM, [email protected] ( [email protected]) wrote: Send TriEmbed mailing list submissions to [email protected] To subscribe or unsubscribe via the World Wide Web, visit http://mail.triembed.org/mailman/listinfo/triembed_triembed.org or, via email, send a message with subject or body 'help' to [email protected] You can reach the person managing the list at [email protected] When replying, please edit your Subject line so it is more specific than "Re: Contents of TriEmbed digest..." Today's Topics: 1. GPS/RF issue (Charles West) ---------------------------------------------------------------------- Message: 1 Date: Tue, 30 Apr 2019 10:33:52 -0400 From: Charles West <[email protected]> To: TriEmbed <[email protected]> Subject: [TriEmbed] GPS/RF issue Message-ID: <cagojqskzbjl_jt_kc6tffrg3rk6_fsrjasxsszx8kzsxrwr...@mail.gmail.com> Content-Type: text/plain; charset="utf-8" Hello from the North! I'm still working on the golf course robot. Recently I've run into a rather odd issue. When I put everything together for my 1/8 scale RC car platform, my GPS module refused to converge. I spent a solid 4 days debugging it only to eventually discover that the problem appeared to be that my USB 3 camera was putting out large amounts of RF interference of a spectrum suitable to interfere with my GPS even when there was a metal ground plane between the GPS and the rest of the equipment. Eventually, a combination of wrapping the camera in metal tape, placing the GPS with a ground plane elevated way above the rest of the robot and wrapping the camera's cable in aluminum foil finally got the GPS to converge. The only problem is, the accuracy of the GPS is far worse than in the previous version of the robot. Originally, I got within a 2-3 meters with an occasional drift. Now it squiggles all over the place. Does anyone know what I should try next to get decent performance and/or hunt down any interference for the GPS? Thanks, Charlie West -------------- next part -------------- An HTML attachment was scrubbed... URL: < http://mail.triembed.org/pipermail/triembed_triembed.org/attachments/20190430/a3c0b2f2/attachment.html> -------------- next part -------------- A non-text attachment was scrubbed... Name: wavyGPS.png Type: image/png Size: 4643241 bytes Desc: not available URL: < http://mail.triembed.org/pipermail/triembed_triembed.org/attachments/20190430/a3c0b2f2/attachment.png> -------------- next part -------------- A non-text attachment was scrubbed... Name: wavyGPS1.png Type: image/png Size: 4451082 bytes Desc: not available URL: < http://mail.triembed.org/pipermail/triembed_triembed.org/attachments/20190430/a3c0b2f2/attachment-0001.png> ------------------------------ Subject: Digest Footer _______________________________________________ TriEmbed mailing list [email protected] http://mail.triembed.org/mailman/listinfo/triembed_triembed.org ------------------------------ End of TriEmbed Digest, Vol 71, Issue 14 ****************************************
{kind=link}
{kind=link}
_______________________________________________ Triangle, NC Embedded Computing mailing list To post message: [email protected] List info: http://mail.triembed.org/mailman/listinfo/triembed_triembed.org TriEmbed web site: http://TriEmbed.org To unsubscribe, click link and send a blank message: mailto:[email protected]?subject=unsubscribe