I would like a longer flight time and something that can be flown outside in some wind. My primary focus is delivering a BBB equipped with 802.15.4 and wifi running my pentesting Linux distro to hard to reach targets. On May 12, 2014 7:11 PM, "Mike McDonald" <[email protected]> wrote:
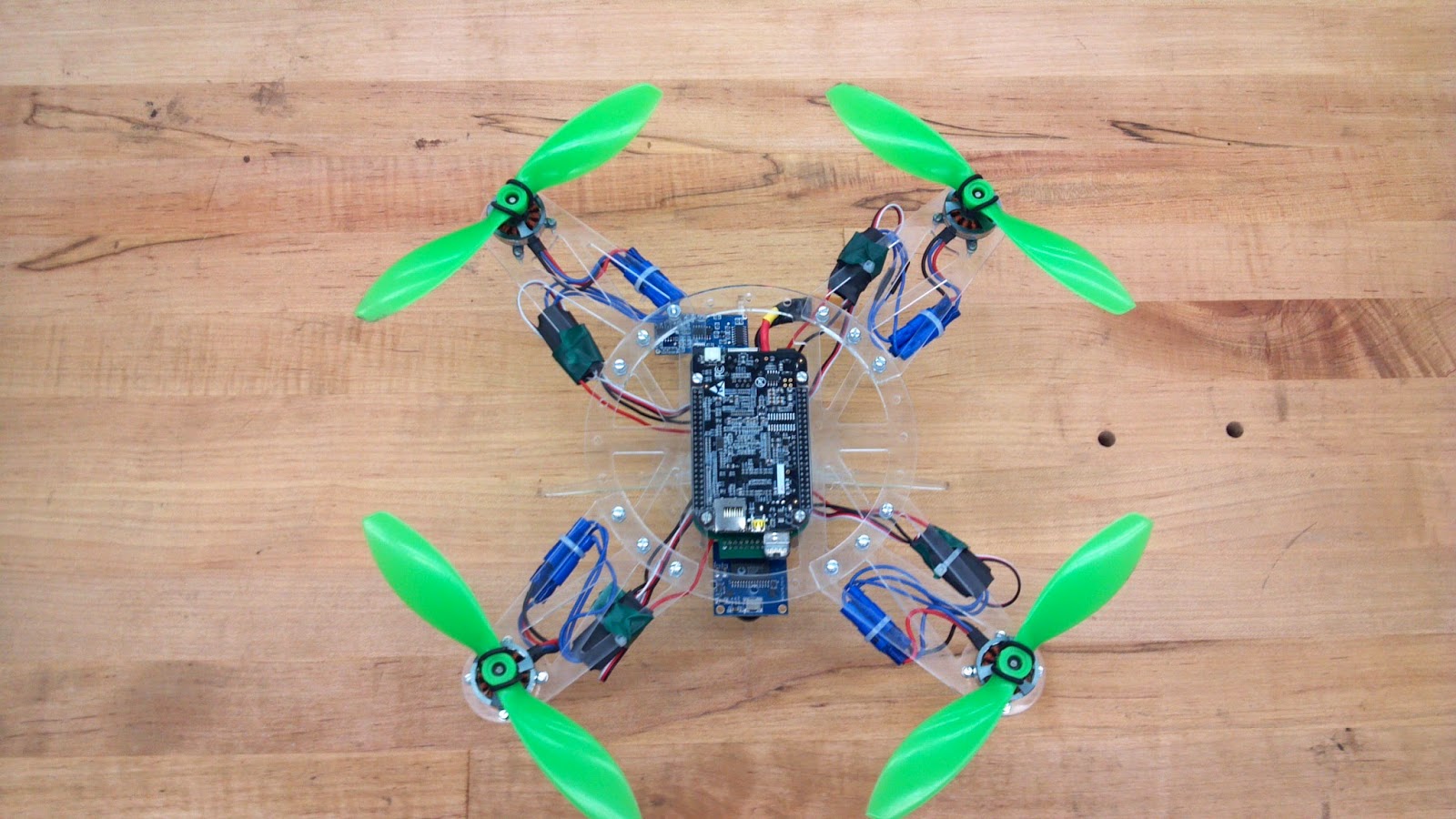
> Hey guys, > > A group of Rose-Hulman students have been hard at work this past year > building a Beaglebone Quadcopter with these goals in mind: > > 1. Low cost ($100-150 w/o Beaglebone) > 2. Fully open source (Cape, Frame, and all control software) on our > Github<https://github.com/Rose-Hulman-ROBO4xx/1314-BeagleBone-Quadcopter/tree/master_rev2> > . > 3. Easy to assembly and repair (we estimate it will take 1-2 hours to > assemble and get ready to fly) > 4. Durable and easy to fly (currently supports USB game controller > control, though we initially tested using a USB RC controller, though it's > also possible to eventually use a cell phone as a controller) with a 10 > minute flight time > 5. Sensor packed: 9-Axis (MPU 9150), Altimeter (BMP 180), Ultrasonic > Rangefinder (HC SR04), Battery Gas Gauge (MAX 17044), and CMOS Camera > (OV7670). > > The Quadcopter is flown via WiFi and Bluetooth (though streaming video > doesn't yet work over Bluetooth) from a host computer (you need somewhere > to view the streaming video from). Additionally, we're using a Debian image > and have added Xenomai for better real time performance. We're also using > both PRU's: one for real time motor control and one for the camera. With > the quadcopter software running, we've still got 80+% of the CPU free for > other processing (OpenCV, etc.). > > We're currently using a PID control scheme, but we may be switching to a > sweet state variable feedback system (or getting a senior design group next > year to do it). > > So, we want some feedback from you guys on the following: > > 1. > *Would you buy one of these Quadcopters? * > 2. > *Is our price point reasonable? Is this something worth selling ourselves > or would this be a good kickstarter project? * > 3. *Are there any other features you think are critical (wouldn't buy > without it)?* > > If you want to dive deeper into our design: > > 1. *How does the software look (particularly the PRU to C interface)? > Would you be willing to maintain it, or update it to State Variable?* > 2. *How does the PCB look? Are there any flaws you see? Would you want > to add or remove any other sensors?* > 3. *How does the mechanical design (Quadcopter frame) look? Is it > aesthetically pleasing? Easy to build (if you have a laser cutter, give it > a try and let us know)? Easy to fix when broken?* > > Here are some pictures: > > > <https://lh4.googleusercontent.com/-kgxIfN6_fL8/U3Ffs2ZPgsI/AAAAAAAAAFM/u8omMlHOvHY/s1600/2013-12-18_14-34-02_876.jpg> > > > <https://lh4.googleusercontent.com/-TKaZ6oB1_uA/U3Ff9Si5xcI/AAAAAAAAAFc/nr2p7Wztm-M/s1600/2013-12-18_14-34-24_871.jpg> > > > <https://lh4.googleusercontent.com/-fhFlpxYzDIk/U3FgD43LFvI/AAAAAAAAAFk/Tag00rk5ww4/s1600/2014-03-30_14-06-29_481.jpg> > > > <https://lh3.googleusercontent.com/-xhMc-hNYpT8/U3FgKukzMYI/AAAAAAAAAFs/T-Sd2HiQB9M/s1600/2014-03-30_14-06-37_787.jpg> > > Videos are available on here > <https://www.dropbox.com/sh/0pfk43b3zq14rjh/xk6Kl6lccb#/>(and on the > github<https://github.com/Rose-Hulman-ROBO4xx/1314-BeagleBone-Quadcopter/tree/master_rev2>). > Our best video is probably > here<https://www.dropbox.com/sh/0pfk43b3zq14rjh/xk6Kl6lccb#lh:null-Video%20May%2011%2C%206%2004%2014%20PM.mov>, > as it shows it both flying as well as the streaming video. > > If you guys have any questions, respond here or email me back. > > Thanks! > > > > > > > -- > For more options, visit http://beagleboard.org/discuss > --- > You received this message because you are subscribed to the Google Groups > "BeagleBoard" group. > To unsubscribe from this group and stop receiving emails from it, send an > email to [email protected]. > For more options, visit https://groups.google.com/d/optout. > -- For more options, visit http://beagleboard.org/discuss --- You received this message because you are subscribed to the Google Groups "BeagleBoard" group. To unsubscribe from this group and stop receiving emails from it, send an email to [email protected]. For more options, visit https://groups.google.com/d/optout.
{kind=link}
{kind=link}
{kind=link}
{kind=link}