Skip, Thanks for the feedback. I forgot to mention above, but we're including a GPS on the Rev 3.2 boards (just got them and will assemble them soon) that's the same as the Adafruit Ultimate GPS<http://www.adafruit.com/products/746>. It seemed to be a good combo of power and cost (we can get them in bulk for $15). We haven't incorporated this into the code, but given the nature of OSS, we're taking the Field of Dreams approach ("If you build it they will develop with it"), providing a platform that works and can be expanded upon as more users desire that functionality.
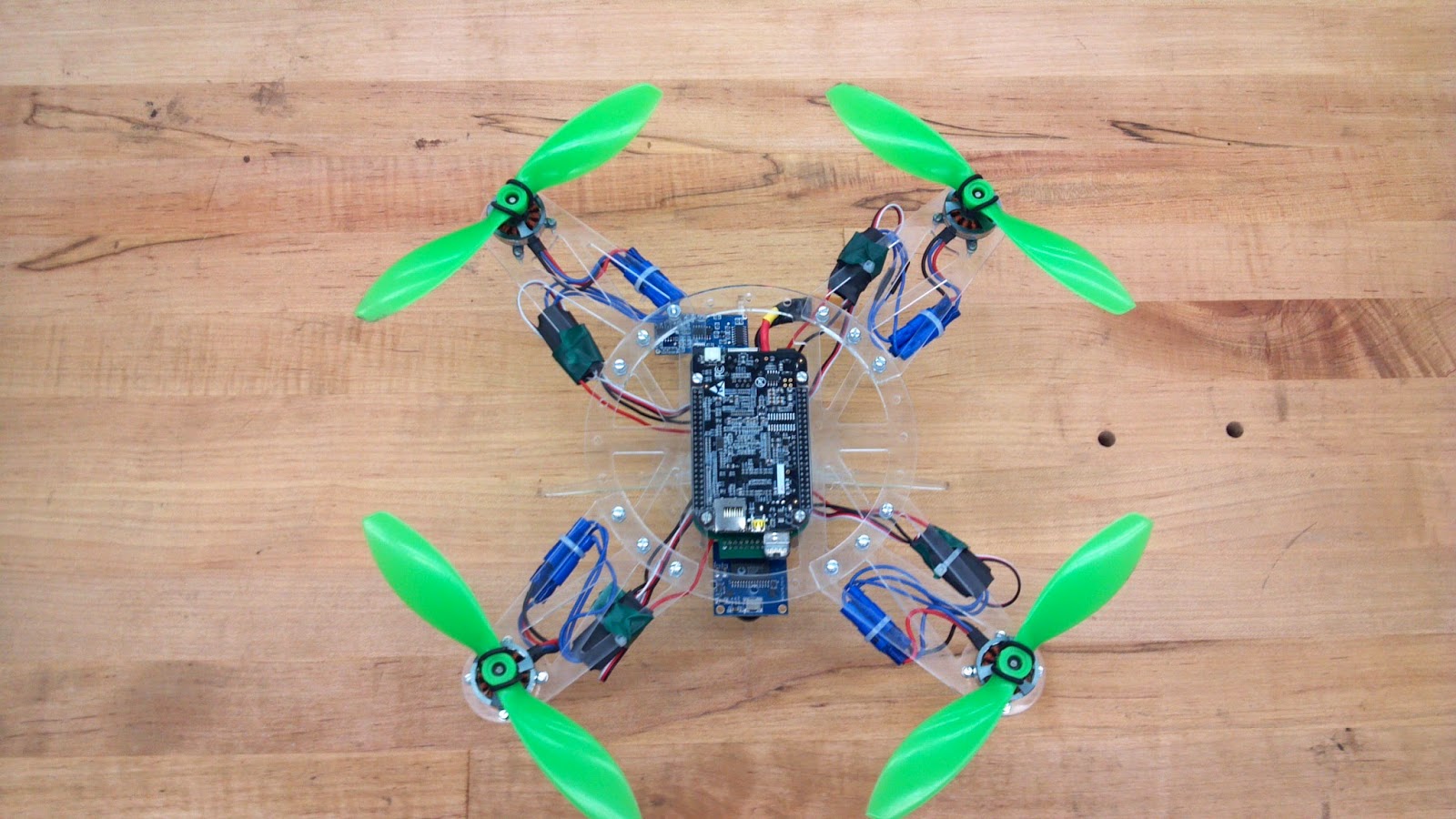
Version 1.0 of the frame was laser cut acrylic, and you're right, it flexed a good bit (which worried us a lot). We also made it out of wood for comparison and got significantly better performance, and slightly less flex (for half the weight). We considered materials like G-10 (actually just making the cape the frame [terrible idea since if it breaks you're screwed and have to replace the most expensive part]) and carbon fiber (expensive and difficult to work with as laser cutters have issues with carbon), and settled on this frame design since it provides the minimum amount of structure necessary to provide what we need at the given cost point. We have also included an extra arm and extra landing plate in case either of these break (possibly just two arms in the future). The design we have also allows for adding longer arms (and more arms) to easily make any geometry multicopter (tri to octo), while a "traditional" frame simply couldn't do that. As for durability, we're a bunch of college kids, so breaking things is pretty much routine. We've spent a good part of the last month crashing this quadcopter into the ground, the ceiling, walls, ourselves, trees, etc. and seem to be getting pretty good durability from it. We could have made the frame out of a stronger material (G-10, aluminum, etc.), but we actually kinda want the frame to break before anything else on the quadcopter does, since the frame is the cheapest and easiest to repair, we'd rather have it fail than have a strong frame end up transferring force to the cape or the bone. I think the easiest solution to making our frame more durable would be to double up on the arms (put a set on the top and bottom of the main plate, and beef up the supports by where they attach) to get some 3D strength (like the frame you posted). I think we will try a stiffer material (G-10 or similar fiberglass) and see how that goes. I could even see a world where we simply make the base frame and the arms as PCB's and run traces for the motors out to the end of the arms. Thanks and let me know if you have other thoughts around this, --Mike On Wednesday, May 14, 2014 11:12:24 AM UTC-4, skip wrote: > > Mike, > > That is a very interesting project. For ~$250 mark I think it is a > viable kickstarter project. I'd buy one. I like the idea of having the > extra compute power to experiment with OpenCV, sense and avoid systems, > etc. Some things that would be nice to add / change (although these aren't > really deal breakers) are GPS position and altitude hold (perhaps using a > uBlox NEO 6M.) One thing that does concern me is the frame. It looks like > laser cut acrylic. I don't think that material is strong or rigid enough > for a quad frame of that size. I'd look into G10 as an option. This would > increase your cost, but would provide a much better frame. Another option > is to look at some of the cheaper, off the shelf frames available. Flite > Test makes some great kits using mostly wood (and some G10) that are cheap > and possibly more robust. They are also very easy to fix in the event of a > crash. The H quad has the largest payload platform, you can find it here; > http://shop.flitetest.com/multirotors/knuckle-h-quad-370-kit/ I think a > robust, or easily repairable frame is very important considering the > application here. Since this is such a great platform for experimenting > with autonomous or semi-autonomous flight there are most certainly going to > be crashes. Having a frame that will survive or be easily repaired would be > a must. > > Thanks, > SKip > > On May 12, 2014, at 8:11 PM, Mike McDonald wrote: > > Hey guys, > > A group of Rose-Hulman students have been hard at work this past year > building a Beaglebone Quadcopter with these goals in mind: > > 1. Low cost ($100-150 w/o Beaglebone) > 2. Fully open source (Cape, Frame, and all control software) on our > Github<https://github.com/Rose-Hulman-ROBO4xx/1314-BeagleBone-Quadcopter/tree/master_rev2> > . > 3. Easy to assembly and repair (we estimate it will take 1-2 hours to > assemble and get ready to fly) > 4. Durable and easy to fly (currently supports USB game controller > control, though we initially tested using a USB RC controller, though it's > also possible to eventually use a cell phone as a controller) with a 10 > minute flight time > 5. Sensor packed: 9-Axis (MPU 9150), Altimeter (BMP 180), Ultrasonic > Rangefinder (HC SR04), Battery Gas Gauge (MAX 17044), and CMOS Camera > (OV7670). > > The Quadcopter is flown via WiFi and Bluetooth (though streaming video > doesn't yet work over Bluetooth) from a host computer (you need somewhere > to view the streaming video from). Additionally, we're using a Debian image > and have added Xenomai for better real time performance. We're also using > both PRU's: one for real time motor control and one for the camera. With > the quadcopter software running, we've still got 80+% of the CPU free for > other processing (OpenCV, etc.). > > We're currently using a PID control scheme, but we may be switching to a > sweet state variable feedback system (or getting a senior design group next > year to do it). > > So, we want some feedback from you guys on the following: > > 1. > *Would you buy one of these Quadcopters? * > 2. > *Is our price point reasonable? Is this something worth selling ourselves > or would this be a good kickstarter project? * > 3. *Are there any other features you think are critical (wouldn't buy > without it)?* > > If you want to dive deeper into our design: > > 1. *How does the software look (particularly the PRU to C interface)? > Would you be willing to maintain it, or update it to State Variable?* > 2. *How does the PCB look? Are there any flaws you see? Would you want > to add or remove any other sensors?* > 3. *How does the mechanical design (Quadcopter frame) look? Is it > aesthetically pleasing? Easy to build (if you have a laser cutter, give it > a try and let us know)? Easy to fix when broken?* > > Here are some pictures: > > > <https://lh4.googleusercontent.com/-kgxIfN6_fL8/U3Ffs2ZPgsI/AAAAAAAAAFM/u8omMlHOvHY/s1600/2013-12-18_14-34-02_876.jpg> > > > <https://lh4.googleusercontent.com/-TKaZ6oB1_uA/U3Ff9Si5xcI/AAAAAAAAAFc/nr2p7Wztm-M/s1600/2013-12-18_14-34-24_871.jpg> > > > <https://lh4.googleusercontent.com/-fhFlpxYzDIk/U3FgD43LFvI/AAAAAAAAAFk/Tag00rk5ww4/s1600/2014-03-30_14-06-29_481.jpg> > > > <https://lh3.googleusercontent.com/-xhMc-hNYpT8/U3FgKukzMYI/AAAAAAAAAFs/T-Sd2HiQB9M/s1600/2014-03-30_14-06-37_787.jpg> > > Videos are available on here > <https://www.dropbox.com/sh/0pfk43b3zq14rjh/xk6Kl6lccb#/>(and on the > github<https://github.com/Rose-Hulman-ROBO4xx/1314-BeagleBone-Quadcopter/tree/master_rev2>). > > Our best video is probably > here<https://www.dropbox.com/sh/0pfk43b3zq14rjh/xk6Kl6lccb#lh:null-Video%20May%2011%2C%206%2004%2014%20PM.mov>, > > as it shows it both flying as well as the streaming video. > > If you guys have any questions, respond here or email me back. > > Thanks! > > > > > > > > -- > For more options, visit http://beagleboard.org/discuss > --- > You received this message because you are subscribed to the Google Groups > "BeagleBoard" group. > To unsubscribe from this group and stop receiving emails from it, send an > email to [email protected] <javascript:>. > For more options, visit https://groups.google.com/d/optout. > > > -- For more options, visit http://beagleboard.org/discuss --- You received this message because you are subscribed to the Google Groups "BeagleBoard" group. To unsubscribe from this group and stop receiving emails from it, send an email to [email protected]. For more options, visit https://groups.google.com/d/optout.
{kind=link}
{kind=link}
{kind=link}
{kind=link}