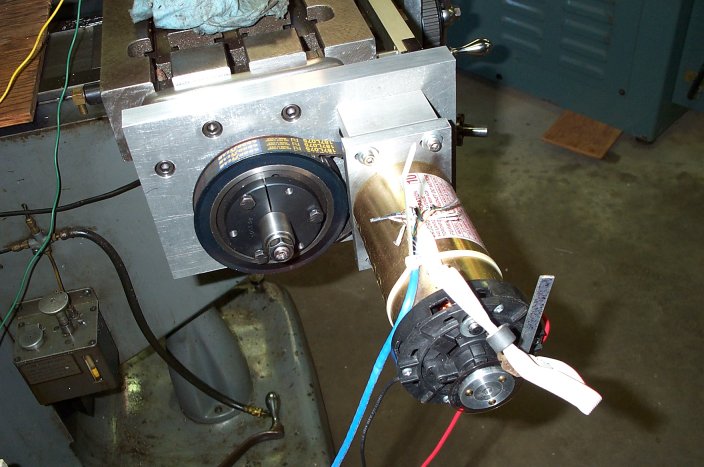
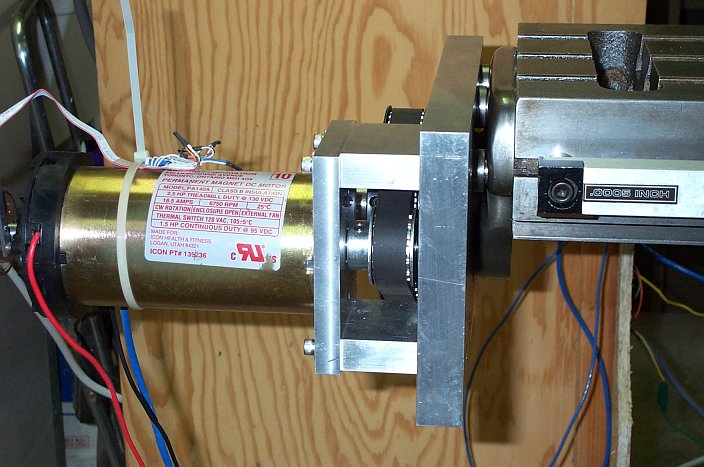
At 12:13 PM 5/15/2010, you wrote: >If it were my mill, I would look for some 90 (or higher) Volt DC brushed >motors from a treadmill or similar. The robot motors will most likely >have proprietary output shafts and drive requirements, which would be >hard to deal with. A more generic motor would most likely have enough >plain shaft to mount a timing belt pulley. You can fit a US Digital >encoder disk and sensor to the motor shaft or preferably to the ball >screw for each axis. If you get the disk and sensor separately you can >save a bit of money by machining the rest of the assembly, and you can >get a custom fit. > >Here is the test setup on my Bridgeport: >http://www.wallacecompany.com/machine_shop/bridgeport/00047-1a.jpg >http://www.wallacecompany.com/machine_shop/bridgeport/00046-1a.jpg >http://www.wallacecompany.com/machine_shop/bridgeport/ > >The ball screws turned out to have a couple of thousandths of an inch >slop, so I need to find another set before I continue with this project. >I'll probably mount a small timing belt between the ball screw to an >encoder, similar to this: >http://www.wallacecompany.com/machine_shop/bridgeport/ > >I would keep the robot intact, run it with EMC2 as a work piece changer, >tool changer and beer server. >-- >Kirk Wallace >http://www.wallacecompany.com/machine_shop/ >http://www.wallacecompany.com/E45/index.html >California, USA
{kind=link}
{kind=link}
Kirk, Problem is, those treadmill motors are almost impossible to find anymore, unless you happen to stumble across a parking lot full of used treadmills. Surplus Center hasn't had them in stock for almost a year now. Mark ------------------------------------------------------------------------------ _______________________________________________ Emc-users mailing list [email protected] https://lists.sourceforge.net/lists/listinfo/emc-users