Things are coming together. Very happy with the results so far. There are some little issues that we have been running into - mostly mechanical. Right now we are trying to figure out why the Y axis ways are not oiling. Looks like some of the channels are plugged - plus some of the pressures/flow regulators are not set right (and oiler fitting being loose in the transmission). (Y ways are oiled by hydraulic fluid)
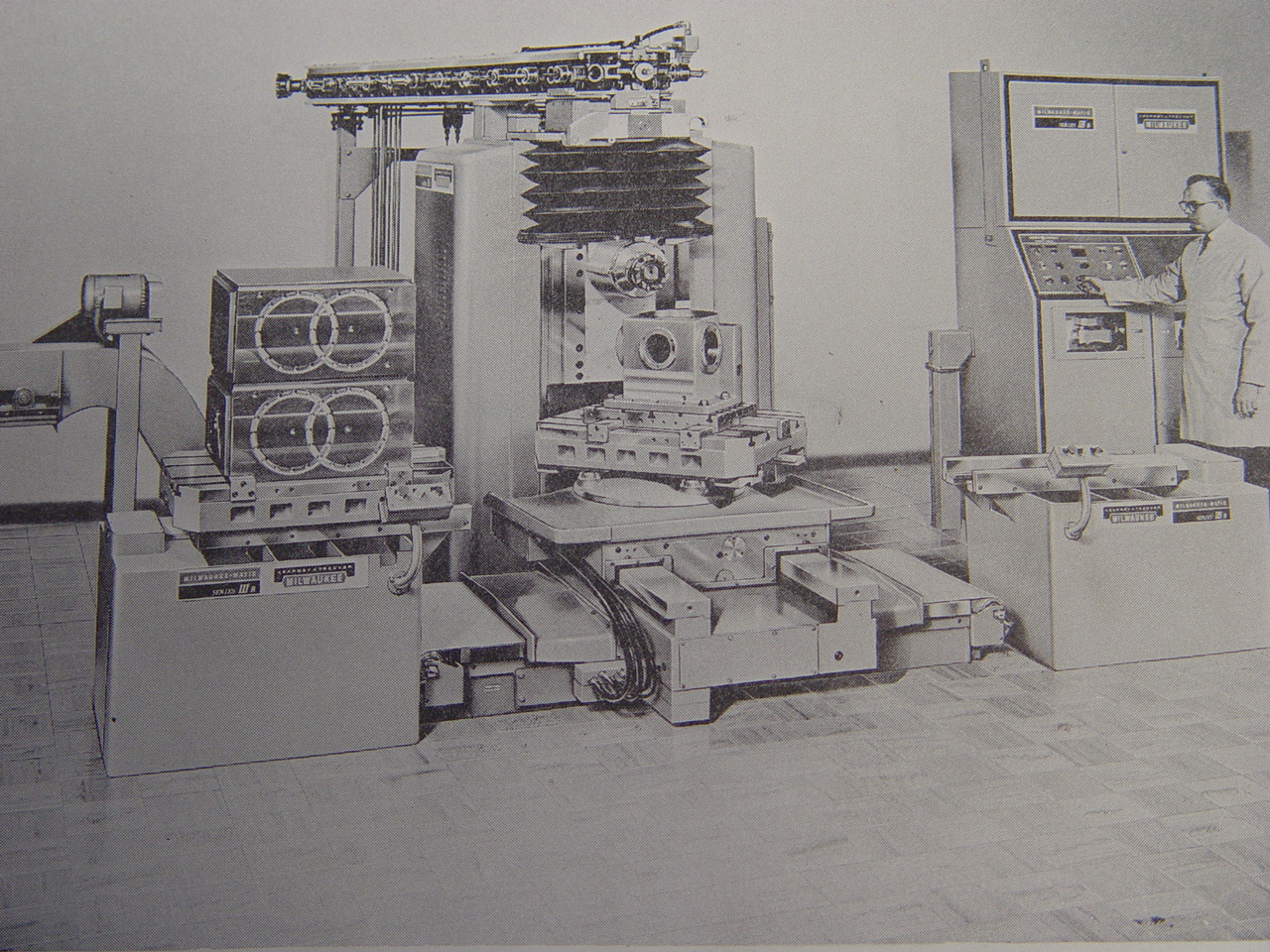
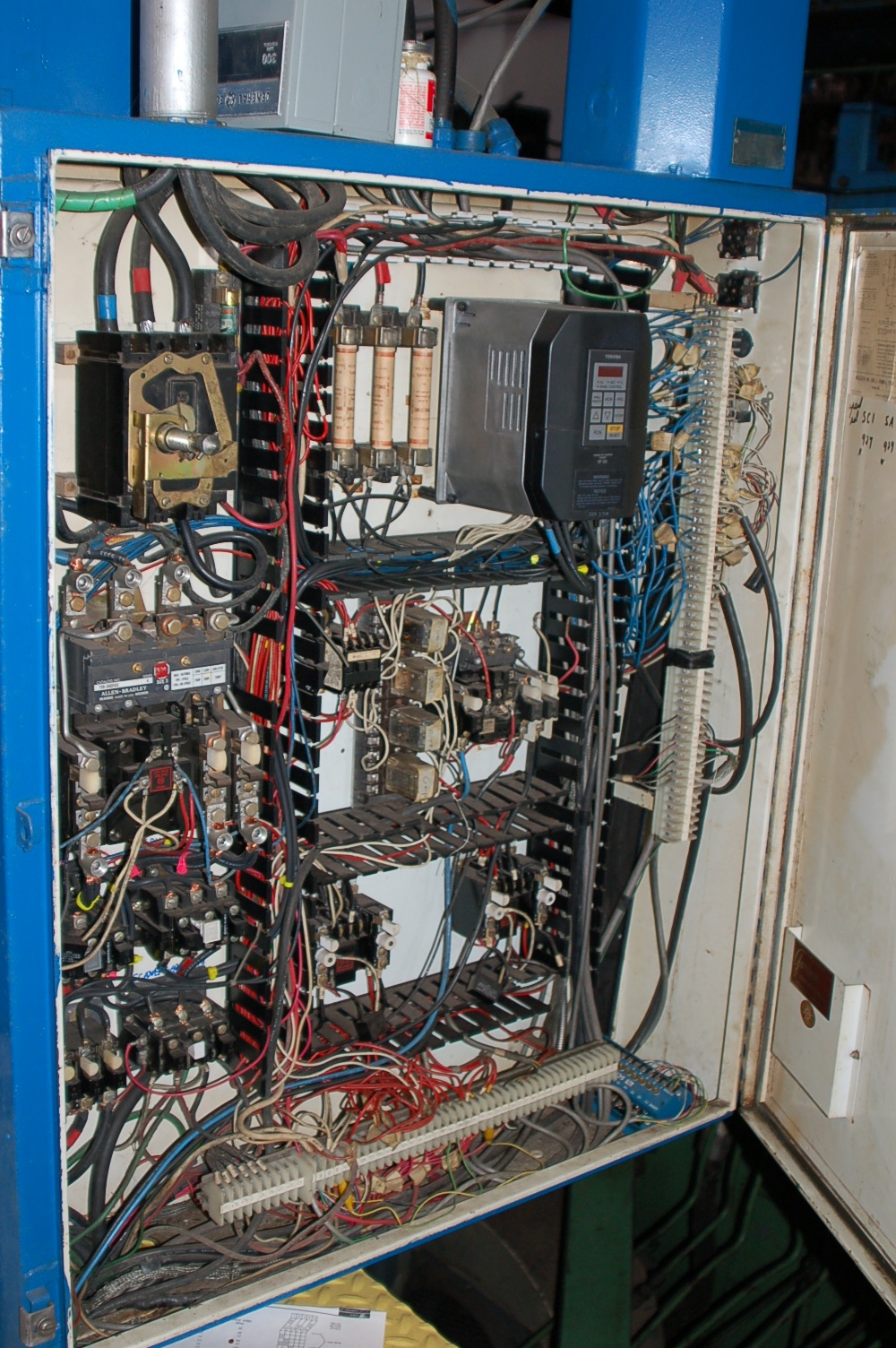
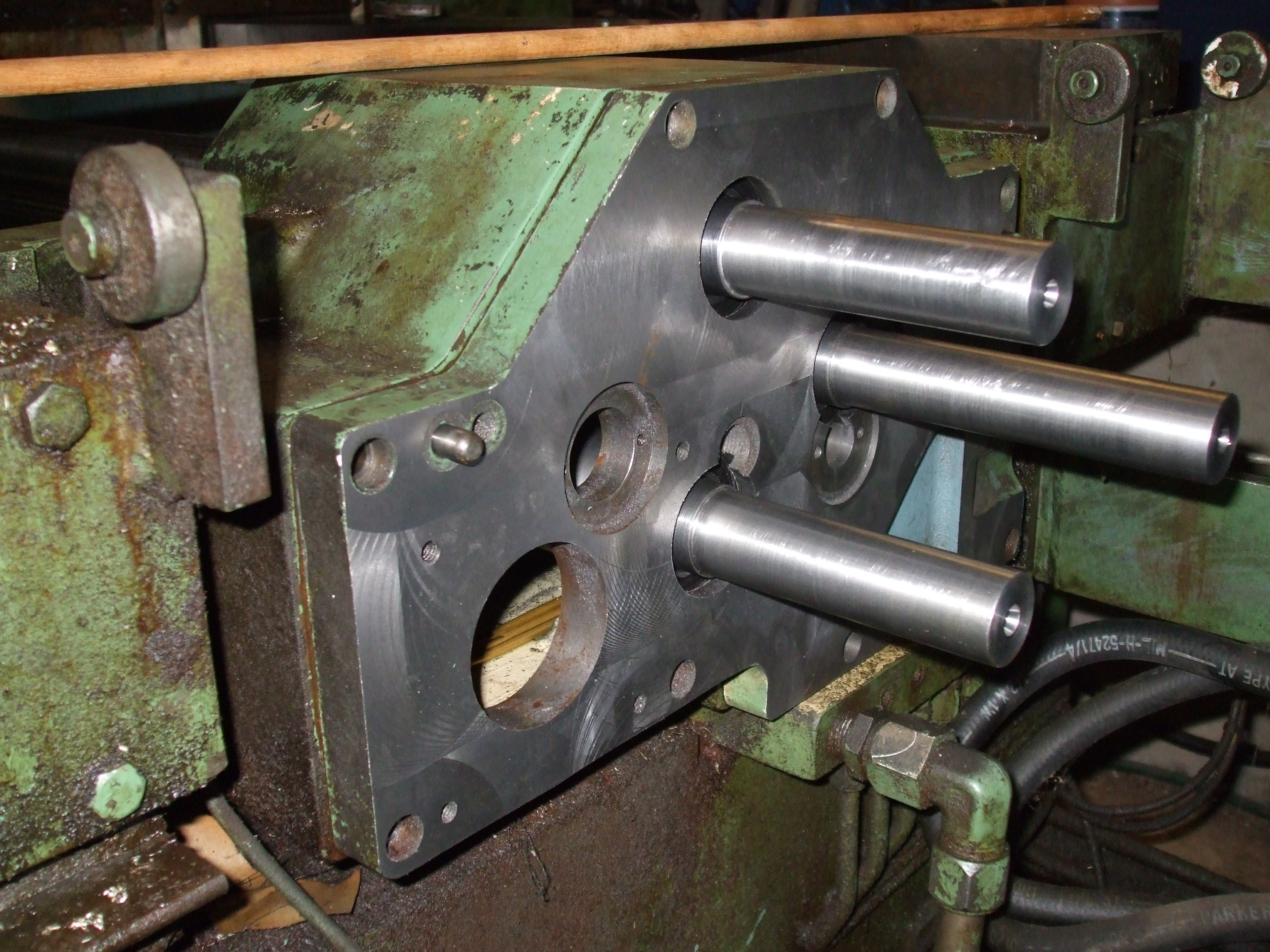
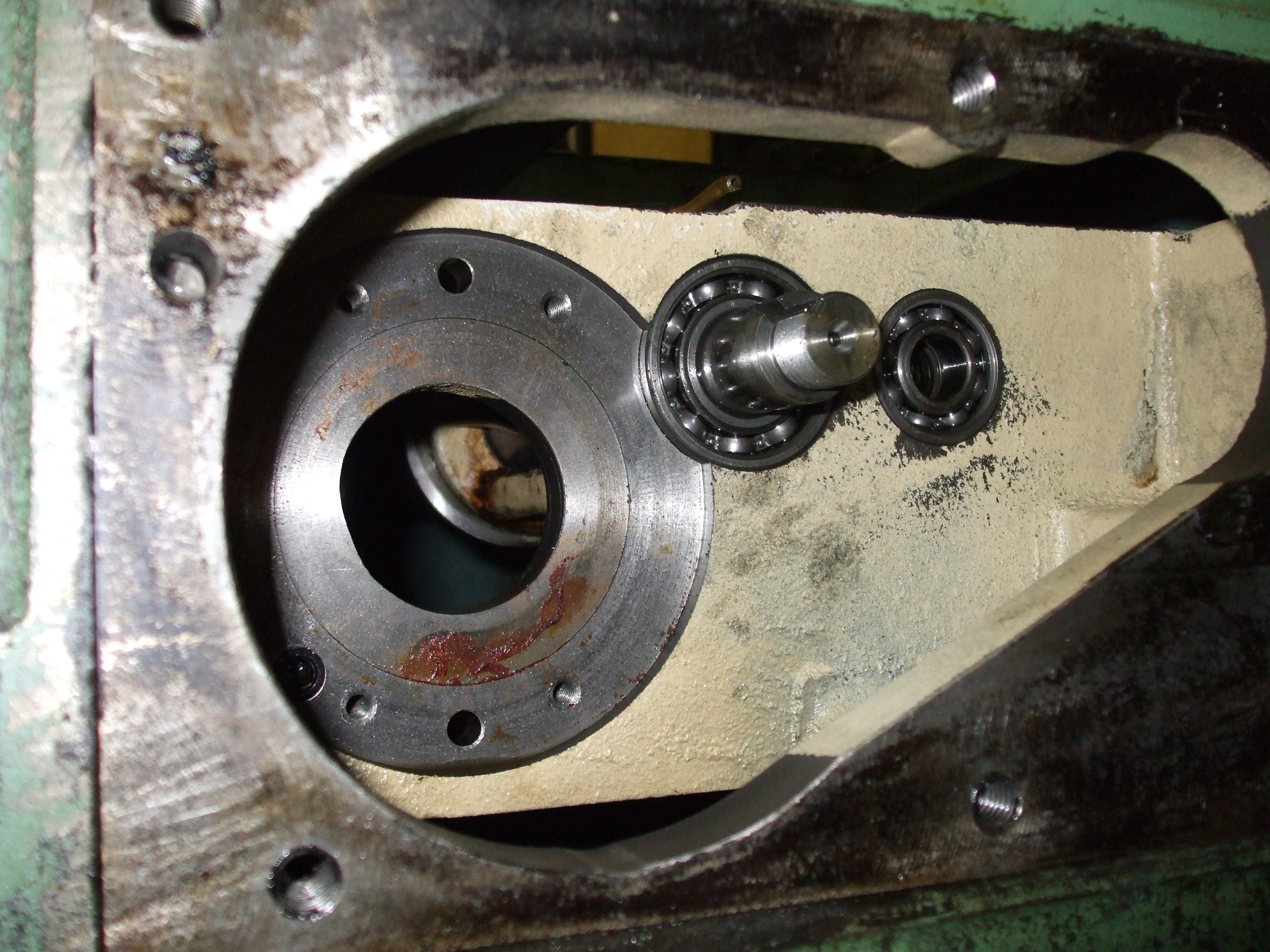
We figured out that the x/z lubing is done with the z clutch. (which isn't there any more) but the solenoid is still. It activates a bijor(sp) type pump that oils the ways and ball screws. We found the solenoid (wasn't hooked up because we didn't need it) and cycled it a bunch. oil started apearing on the ways - yay!. So I need to setup a timer in ladder that will cycle that solenoid every so often. sam On Sun, 10 Oct 2010 06:28:30 -0400 "Mark Wendt (Contractor)" <[email protected]> wrote: > Sam, > > No goofing around allowed, this is serious stuff! Looks > like things are coming together for you. Damn, I wish I could play > with big toyls like that or Stuart's. > > Mark > > At 08:24 PM 10/9/2010, you wrote: > >more goofing around. got a good start on the spindle hal > >component. It seems to shift correctly (16 speed gearbox) this > >video runs through all the gears for about 10 seconds a > >piece. Every other speed is ccw. (just testing that also) the > >bottom 4 of the top 4 black ssr's control the 4 shift rails - you > >can see it count up binary with each gear change. very happy with > >the results. EMC is awesome! > > > >http://www.youtube.com/watch?v=22dWg3GbywE > > > >I am using an encoder on the spindle to make sure the drive train > >spins for a certain amount of time while shifting. (plus in the > >future do closed loop spindle speed) > > > >http://www.electronicsam.com/images/KandT/conversion/spindle/Spindlemotorenc.JPG > > > >This is the hal component so far. Still have to add 'at speed' and > >keylock. (it is messy - I know) > > > >component gearshift16 "gearshift16"; > >// this is a component for a K&T 16 speed spindle transmission. The > >gearbox has 4 shift rails (16 combinations in binary) and a lock seqence. > > > >pin in float spnmotorspeedfb "actual spindle motor speed"; > > > >pin in float cmdspnspeed "spindle command from emc - hooked to > >motion.spindle-speed-cmd-rps - unmolested spindle command"; > > > >pin in float cmdspnwithoverride "this is hooked to the > >motion.spindle-speed-out to get spindle speed with overrride added"; > > > >pin out float spnmotorspeed "spindle speed command to vfd"; > > > >pin out float currselgear "current selected gear"; > >pin out float nextgear "next gear if gear has changed"; > > > >pin in float shiftrpm "rpm for which the gear shifting takes place"; > > > >pin in float shiftencodercounts "number of encoder counts to wait > >while shifting"; > > > >pin in signed rawcountsin "raw counts for counting shifting time"; > > > >pin out bit shpsol "pressure enable for rails"; > >pin out bit sc1sol "shift rail bit 0"; > >pin out bit sasol "shift rail bit 1"; > >pin out bit sc2sol "shift rail bit 2"; > >pin out bit sssol "shift rail bit 3"; > >pin out bit ksol "spindle lock sol"; > > > >pin in bit enable "enable gearshift componant and shift into gear 0"; > >pin out bit enabled "transission has been shifted into gear 0 - > >should be changed into variable after debugging"; > >pin in bit spnon "spindle on"; > >pin out bit spnonflag "flag set when spindle is first turned on so > >to know not to shift while spindle is on"; > >pin in bit spnbrake "check to see if spindle is actually off or the > >spindle override is 0 - hack"; > >pin in bit spindlelock "spindle lock activate"; > >pin out float shifting "flag to know when the comp is in shift mode"; > >pin out bit shift "flag to tell the transmission to shift when next > >possible"; > > > >// this didn't work - jepler added rps pin that is unmolested by override. > >// pin in float haluiso "hooked to spindle override pin in halui for > >calculating actual commanded spindle command"; > >// pin out float actspnspeed "calculated commanded spindle speed > >based on halui spindle speed."; > > > >pin out float capturedraw "inital spindle raw counts for shifting"; > > > >pin in bit oneps "shift rail pressure sensor"; > > > > > >function _ ; > >license "GPL"; > >;; > > > >#include <rtapi_math.h> > > > > > > > >FUNCTION(_) { > >static double RATIO[16]={.0310168, .0350028, .0397274, .0444520, > >.0804513, .0901584, .1025972, .1146178, .2073476, .2322251, > >.2640781, .2955130, .5356125, .5998969, .6817628, .7662554}; > >static double > >TOPRPM[17]={0,60,70,80,90,150,170,190,210,380,420,480,540,1930,2160,2460,3000}; > >int Gear = 0, gearloop = 0, currgearint = 0; > > > > > > > > > > > > > >currgearint = currselgear; > >//enable and shift into first gear - gear 0 > >if(enable==true && enabled==false) > > { > > spnmotorspeed = shiftrpm; > > if(spnmotorspeedfb<(shiftrpm+30) && > > spnmotorspeedfb>(shiftrpm-30)) > > { > > shpsol=true; > > sc1sol=false; > > sasol=false; > > sc2sol=false; > > sssol=false; > > ksol=false; > > if(capturedraw==0) capturedraw=rawcountsin; > > > >if((capturedraw+shiftencodercounts)>rawcountsin && oneps==true) > > { > > spnmotorspeed = 0; > > enabled = true; > > capturedraw=0; > > currselgear=0; > > > > } > > } > > } > > > > > >//if enable goes false > >if(enable==false) > > { > > ksol=false; > > shpsol=false; > > enabled=false; > > capturedraw=0; > > spnmotorspeed = 0; > > } > > > >//check what gear should be > > > >if(enabled==true && spnbrake == false && spindlelock==false) > > { > > for (gearloop = 1 ; gearloop <= 16 ; gearloop++) > > { > > if(fabs(cmdspnspeed*60)<=TOPRPM[gearloop] && > > fabs(cmdspnspeed*60)>TOPRPM[gearloop-1]) > > { > > nextgear=gearloop-1; > > if(nextgear != > > currselgear){shift=true;}else{shift=false;} > > } > > } > > } > >//spindle lock logic > > > > > > > > > >//shift when we want to if shift is true > > > >if(shift==true && fabs(cmdspnwithoverride)>0) > > { > > > > Gear=nextgear; > > shifting = true; > > spnmotorspeed = shiftrpm; > > if(spnmotorspeedfb<(shiftrpm+30) && > > spnmotorspeedfb>(shiftrpm-30)) > > { > > sc1sol=Gear & 1 ; > > sasol=Gear & 2; > > sc2sol=Gear & 4; > > sssol=Gear & 8; > > ksol=false; > > if(capturedraw==0) capturedraw=rawcountsin; > > > >if((capturedraw+shiftencodercounts)>rawcountsin && oneps==true) > > { > > spnmotorspeed = 0; > > capturedraw=0; > > currselgear=Gear; > > shifting = false; > > //spnonflag=true; > > //shift=false; > > } > > } > > > > } > > > >if(shifting==false && enabled == true && spindlelock == false) > > { > > spnmotorspeed = cmdspnwithoverride/RATIO[currgearint]; > > } > > > >if(spnbrake==true && enabled == true && spindlelock == false) > > { > > spnmotorspeed = 0; > > } > > > >} > > > > > > > > > > > > > > > >On Wed, 06 Oct 2010 08:17:42 -0500 > > sam sokolik <[email protected]> wrote: > > > Worked a bit on the tool changer arm. > > > > > > http://www.youtube.com/watch?v=ovxW8TKBGWU > > > > > > sam > > > > > > On 10/5/2010 10:15 AM, sam sokolik wrote: > > > > 3 axis moving! ;) > > > > > > > > http://www.youtube.com/watch?v=pOHL_KlUdqw > > > > > > > > sam > > > > > > > > On 9/6/2010 11:38 AM, sam sokolik wrote: > > > >> 2 axis moving! > > > >> > > > >> http://www.youtube.com/watch?v=QU_O_Z7Vv8c > > > >> > > > >> sam > > > >> > > > >> On 8/26/2010 4:38 PM, [email protected] wrote: > > > >>> Well - I fail at copy and paste... > > > >>> > > > >>> this should work better. > > > >>> > > > >>> I thought I would give an update on our ongoing project. > > > >>> > > > >>> This is a 60's vintage NC that used hydraulic servos. we are > > converting it to EMC2 using not quite as old Inland servos. (80's > > vintage) they are 8 brush low rpm high torque. (with the amc > > drives we are using - it will be 40ft-lbs peak.) We are using 2 > > mesa 5i20 boards as we are needing a good 70+ i/o + atleast 7 > > encoder counters and 5 +/-10v outputs. We are at the point where > > the machine is waking up. the mesa hardware is awesome (thank to > > peter and seb for their work). > > > >>> > > > >>> Be sure to watch the 2 videos at the end of this email. > > > >>> > > > >>> lets see if I can create a linear picture show... > > > >>> this is what the machine looked like in the 60s > > > >>> http://electronicsam.com/images/KandT/oldkandt.JPG > > > >>> > > > >>> this is what the machine looks like now > > > >>> http://electronicsam.com/images/KandT/DSCCurrent.JPG > > > >>> > > > >>> getting rid of the old control > > > >>> http://www.electronicsam.com/images/control.jpg > > > >>> > > > >>> this is the old electrical box > > > >>> http://electronicsam.com/images/KandT/conversion/mainelectricalbox.JPG > > > >>> > > > >>> we welded 2 of the same boxes together for new electronics. > > > >>> http://electronicsam.com/images/KandT/conversion/moreelec.jpg > > > >>> > > > >>> here is it mostly hooked up > > > >>> http://electronicsam.com/images/KandT/conversion/mostio.JPG > > > >>> > > > >>> This is the x,z,b gearbox - the old control used 1 hydraulic > > servo to run all 3 axis > > > >>> http://electronicsam.com/images/KandT/conversion/xaxis/start.JPG > > > >>> > > > >>> open > > > >>> http://electronicsam.com/images/KandT/conversion/xaxis/start.JPG > > > >>> > > > >>> stripped > > > >>> http://electronicsam.com/images/KandT/conversion/xaxis/stripped.JPG > > > >>> > > > >>> shafts extended out so we can hook the servos up. > > > >>> http://electronicsam.com/images/KandT/conversion/xaxis/3shafts.JPG > > > >>> > > > >>> servo plate mounted > > > >>> > > http://electronicsam.com/images/KandT/conversion/servo/x-zservo_mount.jpg > > > >>> > > > >>> belts (B axis still needs a solution) > > > >>> http://electronicsam.com/images/KandT/conversion/servo/belts.jpeg > > > >>> > > > >>> Because we are still using the z axis drive train that goes > > up though the saddle - we needed to get the backlash out of it. It > > uses split gears to do that. Grinding 1 washer thinner takes the > > backlash out of 5 sets of gears. the washer is the spacer between > > the 2 lower small gears. > > > >>> http://electronicsam.com/images/KandT/conversion/zaxis/gears.JPG > > > >>> > > > >>> we still have to mount the y axis servo. - The plan is to > > direct couple into this shaft. > > > >>> http://electronicsam.com/images/KandT/conversion/yaxis/yaxisshaft.JPG > > > >>> > > > >>> here is the tool chain logic working... > > > >>> http://www.youtube.com/watch?v=4nuRea6615s > > > >>> > > > >>> here is the first closed loop movement with the x axis > > > >>> http://www.youtube.com/watch?v=FgOqEz5Tk-Y > > > >>> > > > >>> Getting there :) Very happy with the progress. (I only work > > on it about once a week.) > > > >>> > > > >>> sam > > > >>> > > > >>> > > > >>> On Thu, 26 Aug 2010 16:27:29 -0500 > > > >>> <[email protected]> wrote: > > > >>>> I thought I would give an update on our ongoing project. > > > >>>> > > > >>>> This is a 60's vintage NC that used hydraulic servos. we > > are converting it to EMC2 using not quite as old Inland servos. > > (80's vintage) they are 8 brush low rpm high torque. (with the amc > > drives we are using - it will be 40ft-lbs peak.) We are using 2 > > mesa 5i20 boards as we are needing a good 70+ i/o + atleast 7 > > encoder counters and 5 +/-10v outputs. We are at the point where > > the machine is waking up. the mesa hardware is awesome (thank to > > peter and seb for their work). > > > >>>> > > > >>>> Be sure to watch the 2 videos at the end of this email. > > > >>>> > > > >>>> lets see if I can create a linear picture show... > > > >>>> this is what the machine looked like in the 60s > > > >>>> http://electronicsam.com/images/KandT/oldkandt.JPG > > > >>>> > > > >>>> this is what the machine looks like now > > > >>>> http://electronicsam.com/images/KandT/DSCCurrent.JPG > > > >>>> > > > >>>> getting rid of the old control > > > >>>> http://www.electronicsam.com/images/control.jpg > > > >>>> > > > >>>> this is the old electrical box > > > >>>> http://electronicsam.com/images/Kand...ctricalbox.JPG > > > >>>> > > > >>>> we welded 2 of the same boxes together for new electronics. > > > >>>> http://electronicsam.com/images/Kand...n/moreelec.jpg > > > >>>> > > > >>>> here is it mostly hooked up > > > >>>> http://electronicsam.com/images/Kand...ion/mostio.JPG > > > >>>> > > > >>>> This is the x,z,b gearbox - the old control used 1 hydraulic > > servo to run all 3 axis > > > >>>> http://electronicsam.com/images/Kand...axis/start.JPG > > > >>>> > > > >>>> open > > > >>>> http://electronicsam.com/images/Kand...axis/start.JPG > > > >>>> > > > >>>> stripped > > > >>>> http://electronicsam.com/images/Kand...s/stripped.JPG > > > >>>> > > > >>>> shafts extended out so we can hook the servos up. > > > >>>> http://electronicsam.com/images/Kand...is/3shafts.JPG > > > >>>> > > > >>>> servo plate mounted > > > >>>> http://electronicsam.com/images/Kand...ervo_mount.jpg > > > >>>> > > > >>>> belts (B axis still needs a solution) > > > >>>> http://electronicsam.com/images/Kand...rvo/belts.jpeg > > > >>>> > > > >>>> Because we are still using the z axis drive train that goes > > up though the saddle - we needed to get the backlash out of it. It > > uses split gears to do that. Grinding 1 washer thinner takes the > > backlash out of 5 sets of gears. Don't think the previous owner > > ever did this as we had to take a good .040" off the washer. The > > washer is the spacer between the 2 lower small gears. > > > >>>> http://electronicsam.com/images/Kand...axis/gears.JPG > > > >>>> > > > >>>> we still have to mount the y axis servo. - The plan is to > > direct couple into this shaft. > > > >>>> http://electronicsam.com/images/Kand...yaxisshaft.JPG > > > >>>> > > > >>>> here is the tool chain logic working... > > > >>>> YouTube - Kearney and Trecker tool chain logic working in > > EMC2. Mechanically barcoded tools > > > >>>> > > > >>>> here is the first closed loop movement with the x axis > > > >>>> YouTube - Kearney and Trecker first closed loop movement with EMC2. > > > >>>> > > > >>>> Getting there Very happy with the progress. (I only work on > > it about once a week. > > > >>>> > > > >>>> sam > > > >>>> > > > >>>> > > ------------------------------------------------------------------------------ > > > >>>> Sell apps to millions through the Intel(R) Atom(Tm) Developer Program > > > >>>> Be part of this innovative community and reach millions of > > netbook users > > > >>>> worldwide. Take advantage of special opportunities to > > increase revenue and > > > >>>> speed time-to-market. Join now, and jumpstart your future. > > > >>>> http://p.sf.net/sfu/intel-atom-d2d > > > >>>> _______________________________________________ > > > >>>> Emc-users mailing list > > > >>>> [email protected] > > > >>>> https://lists.sourceforge.net/lists/listinfo/emc-users > > > >>> > > ------------------------------------------------------------------------------ > > > >>> Sell apps to millions through the Intel(R) Atom(Tm) Developer Program > > > >>> Be part of this innovative community and reach millions of > > netbook users > > > >>> worldwide. Take advantage of special opportunities to > > increase revenue and > > > >>> speed time-to-market. Join now, and jumpstart your future. > > > >>> http://p.sf.net/sfu/intel-atom-d2d > > > >>> _______________________________________________ > > > >>> Emc-users mailing list > > > >>> [email protected] > > > >>> https://lists.sourceforge.net/lists/listinfo/emc-users > > > >>> > > > >> > > ------------------------------------------------------------------------------ > > > >> This SF.net Dev2Dev email is sponsored by: > > > >> > > > >> Show off your parallel programming skills. > > > >> Enter the Intel(R) Threading Challenge 2010. > > > >> http://p.sf.net/sfu/intel-thread-sfd > > > >> _______________________________________________ > > > >> Emc-users mailing list > > > >> [email protected] > > > >> https://lists.sourceforge.net/lists/listinfo/emc-users > > > >> > > > > > > ------------------------------------------------------------------------------ > > > > Beautiful is writing same markup. Internet Explorer 9 supports > > > > standards for HTML5, CSS3, SVG 1.1, ECMAScript5, and DOM L2& L3. > > > > Spend less time writing and rewriting code and more time creating great > > > > experiences on the web. Be a part of the beta today. > > > > http://p.sf.net/sfu/beautyoftheweb > > > > _______________________________________________ > > > > Emc-users mailing list > > > > [email protected] > > > > https://lists.sourceforge.net/lists/listinfo/emc-users > > > > > > > > > > > > ------------------------------------------------------------------------------ > > > Beautiful is writing same markup. Internet Explorer 9 supports > > > standards for HTML5, CSS3, SVG 1.1, ECMAScript5, and DOM L2 & L3. > > > Spend less time writing and rewriting code and more time creating great > > > experiences on the web. Be a part of the beta today. > > > http://p.sf.net/sfu/beautyoftheweb > > > _______________________________________________ > > > Emc-users mailing list > > > [email protected] > > > https://lists.sourceforge.net/lists/listinfo/emc-users > > > > > >------------------------------------------------------------------------------ > >Beautiful is writing same markup. Internet Explorer 9 supports > >standards for HTML5, CSS3, SVG 1.1, ECMAScript5, and DOM L2 & L3. > >Spend less time writing and rewriting code and more time creating great > >experiences on the web. Be a part of the beta today. > >http://p.sf.net/sfu/beautyoftheweb > >_______________________________________________ > >Emc-users mailing list > >[email protected] > >https://lists.sourceforge.net/lists/listinfo/emc-users > > > > ------------------------------------------------------------------------------ > Beautiful is writing same markup. Internet Explorer 9 supports > standards for HTML5, CSS3, SVG 1.1, ECMAScript5, and DOM L2 & L3. > Spend less time writing and rewriting code and more time creating great > experiences on the web. Be a part of the beta today. > http://p.sf.net/sfu/beautyoftheweb > _______________________________________________ > Emc-users mailing list > [email protected] > https://lists.sourceforge.net/lists/listinfo/emc-users ------------------------------------------------------------------------------ Beautiful is writing same markup. Internet Explorer 9 supports standards for HTML5, CSS3, SVG 1.1, ECMAScript5, and DOM L2 & L3. Spend less time writing and rewriting code and more time creating great experiences on the web. Be a part of the beta today. http://p.sf.net/sfu/beautyoftheweb _______________________________________________ Emc-users mailing list [email protected] https://lists.sourceforge.net/lists/listinfo/emc-users
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}