I played with the grbl and an arduino uno last week. It is a pretty neat. 3 axis with some sort of look ahead.
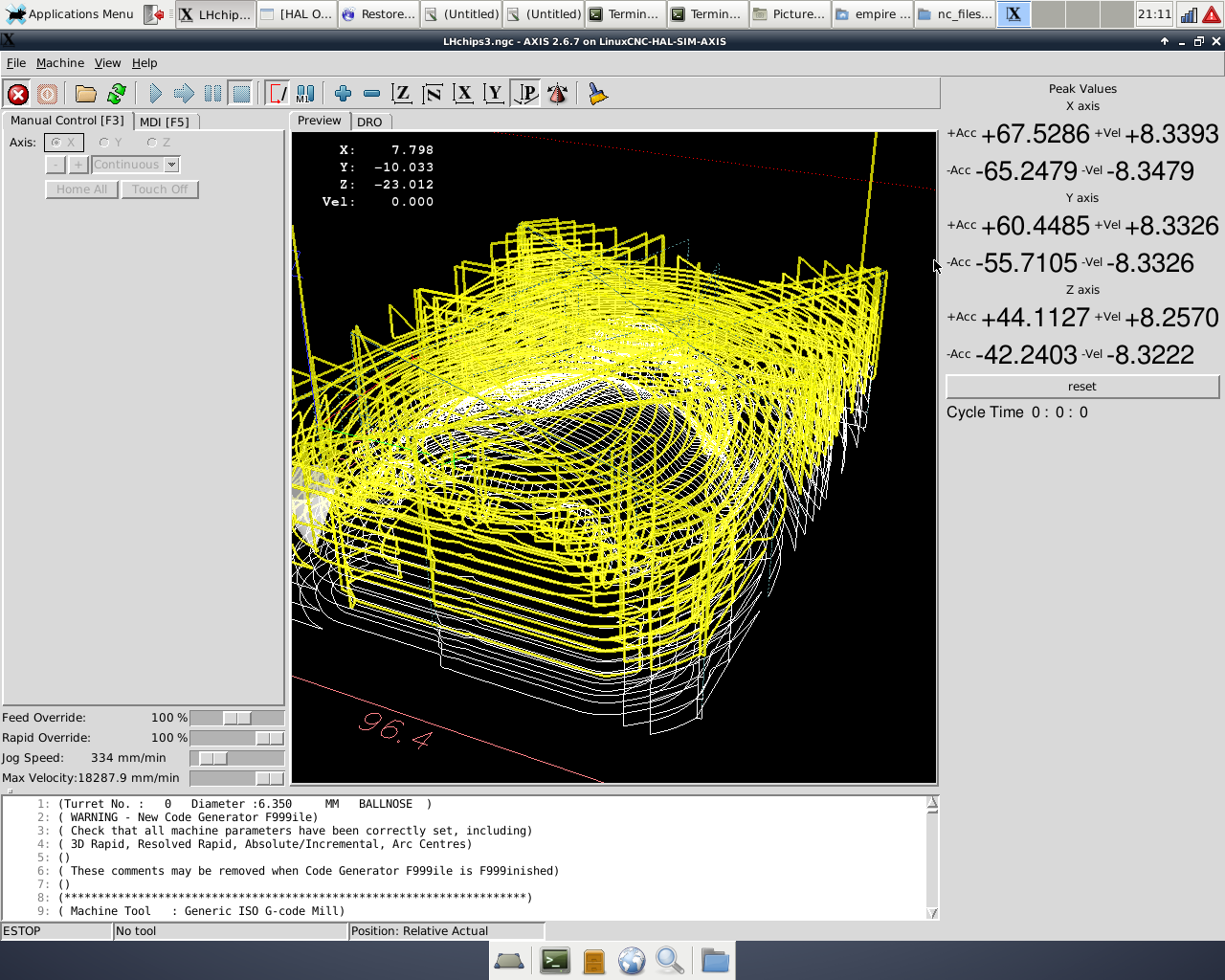
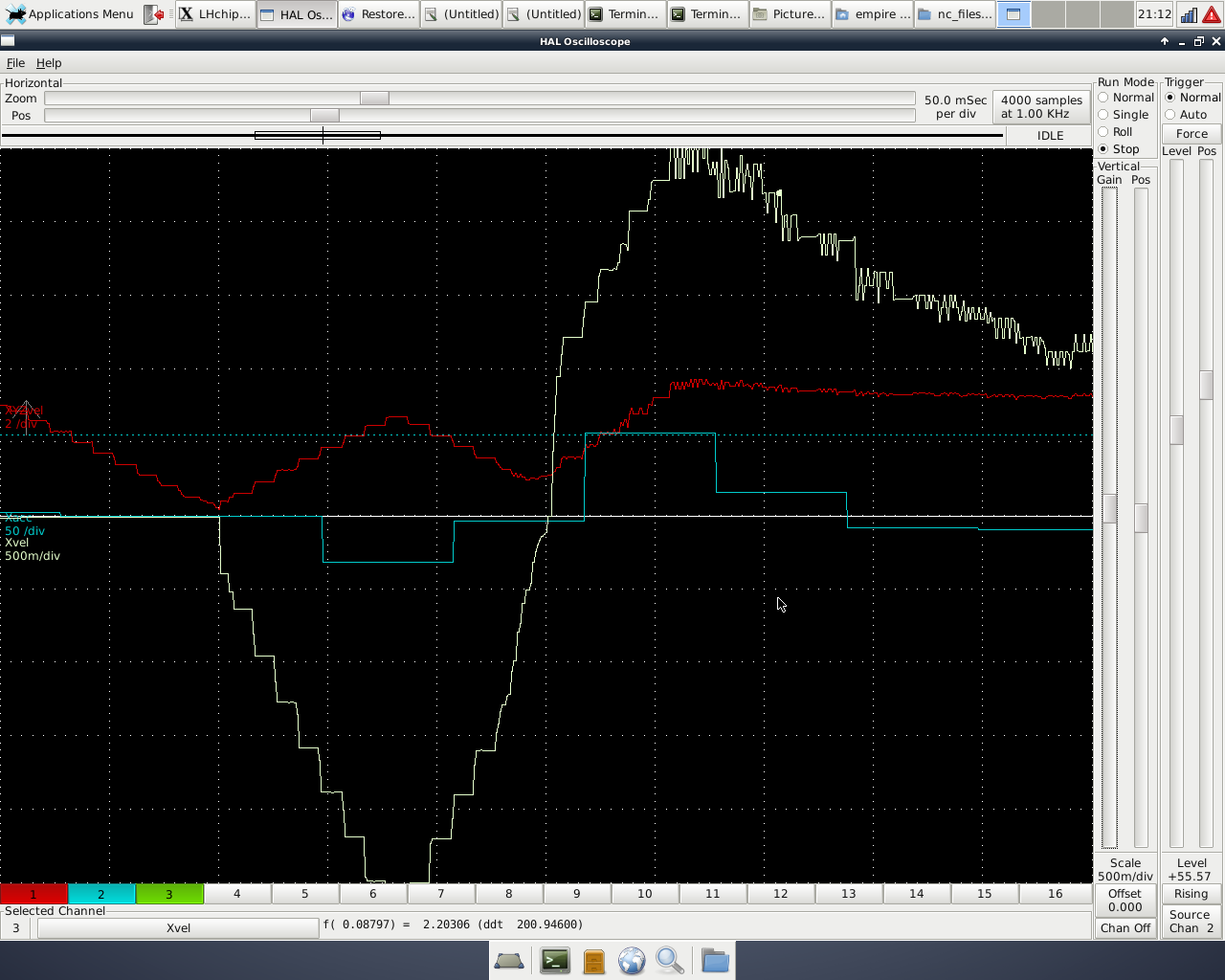
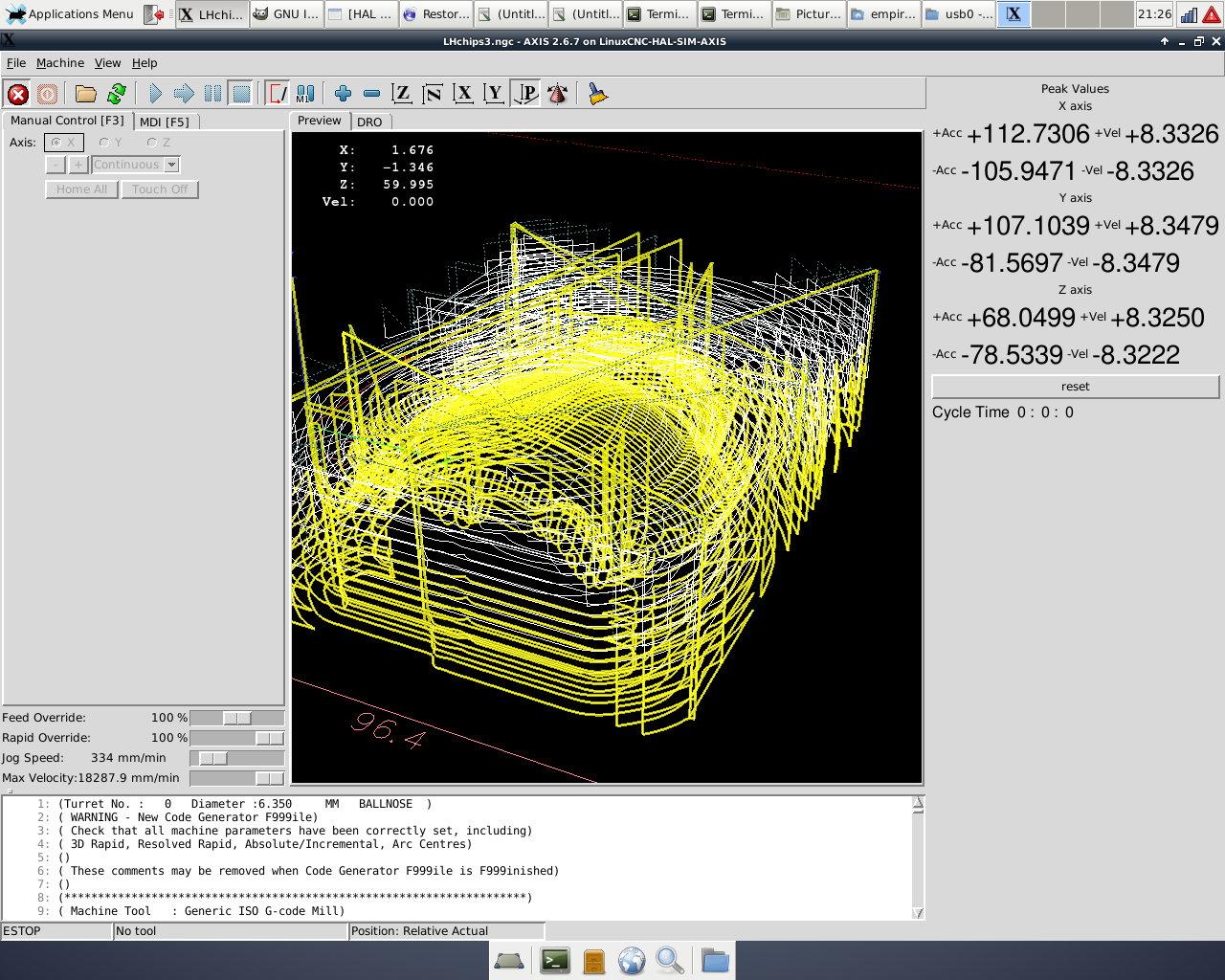
https://github.com/grbl/grbl/wiki I flashed v0.9i and grabbed a popular gui. https://github.com/winder/Universal-G-Code-Sender I set the grbl to 30ins^2 and 500ipm. (metric is how the config is set 768mm/s^2 and 12700mm/m) It has a setting for $11=0.020 (junction deviation, mm) Which has an odd quote... Junction deviation is used by the acceleration manager to determine how fast it can move through line segment junctions of a G-code program path. For example, if the G-code path has a sharp 10 degree turn coming up and the machine is moving at full speed, this setting helps determine how much the machine needs to slow down to safely go through the corner without losing steps. How we calculate it is a bit complicated, but, in general, higher values gives faster motion through corners, while increasing the risk of losing steps and positioning. Lower values makes the acceleration manager more careful and will lead to careful and slower cornering. So if you run into problems where your machine tries to take a corner too fast, /decrease/ this value to make it slow down when entering corners. If you want your machine to move faster through junctions, /increase/ this value to speed it up. For curious people, hit this link <http://t.co/KQ5BvueY> to read about Grbl's cornering algorithm, which accounts for both velocity and junction angle with a very simple, efficient, and robust method. anywhoo... I ran one of my test programs.. (sort of tux on steroids..) http://electronicsam.com/images/KandT/testing/grbl/grblplot.png 10:23 min. As you can see - consistent violations. (2X config acceleration) The slope of the velocity really shows it. http://electronicsam.com/images/KandT/testing/grbl/grblhalscope1.png http://electronicsam.com/images/KandT/testing/grbl/grblhalscope2.png Now setting the 'junction' deviation to .1mm (.003937") http://electronicsam.com/images/KandT/testing/grbl/grblplothigher.png 8:07 min. So - the deviation setting does effect the acceleration 'yeck' http://electronicsam.com/images/KandT/testing/grbl/grblhalscopehigher.png -- Running on linuxcnc http://electronicsam.com/images/KandT/testing/grbl/linuxcnc01.png 13:28 there is no way I could get it to 10.23 mins. If I set linuxcnc acceration to 60in/s^2 - the gcode program runs in 9:40. I didn't find any major violations in grbl (huge acc spikes) in the testing I did (few programs) so I think it is pretty decent - just consistently higher. I think trajectory planning is hard.. :) Great work Rob... sam ------------------------------------------------------------------------------ _______________________________________________ Emc-users mailing list [email protected] https://lists.sourceforge.net/lists/listinfo/emc-users
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}