and mach3 running same program http://electronicsam.com/images/KandT/testing/grbl/machlog.png
{kind=link}
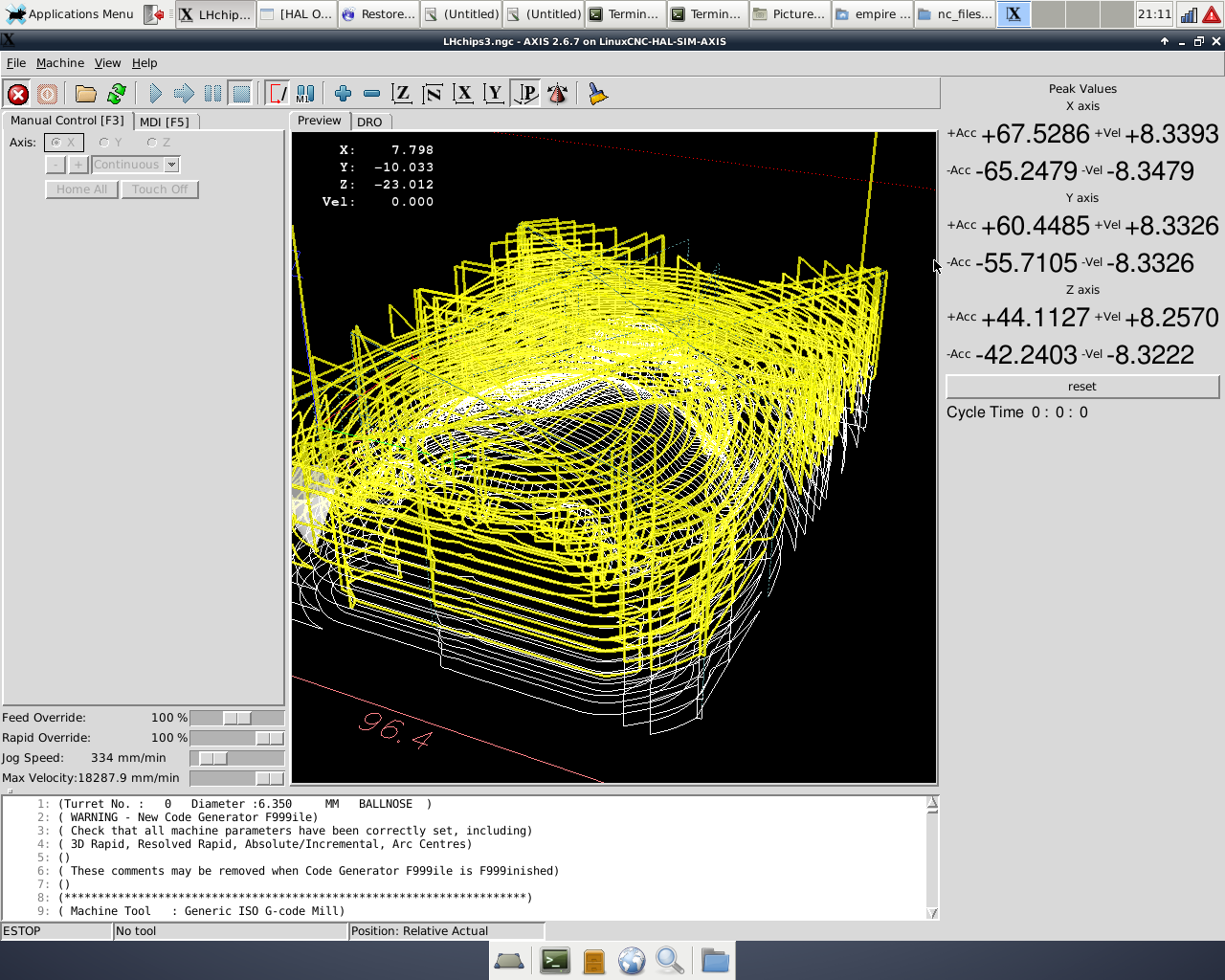
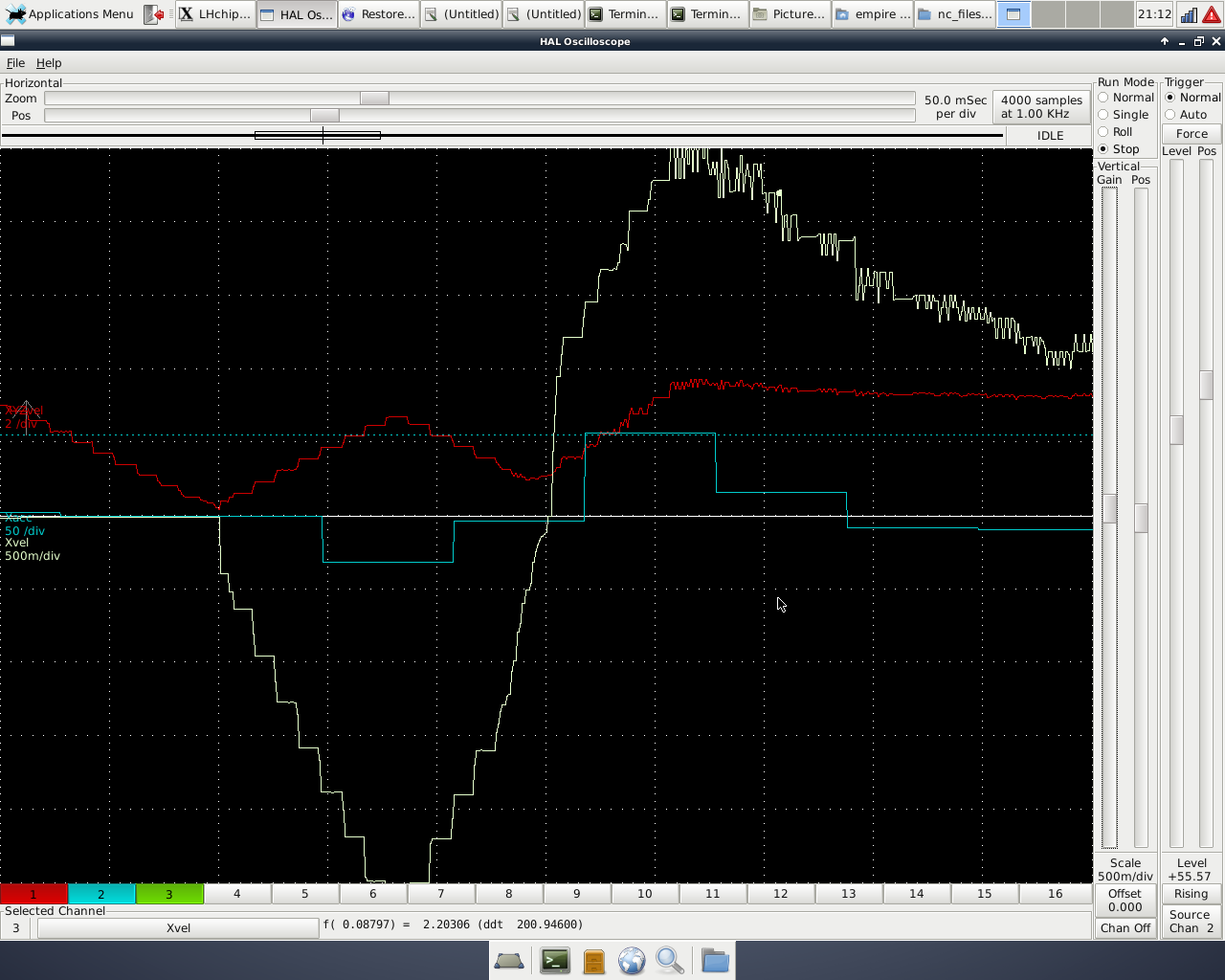
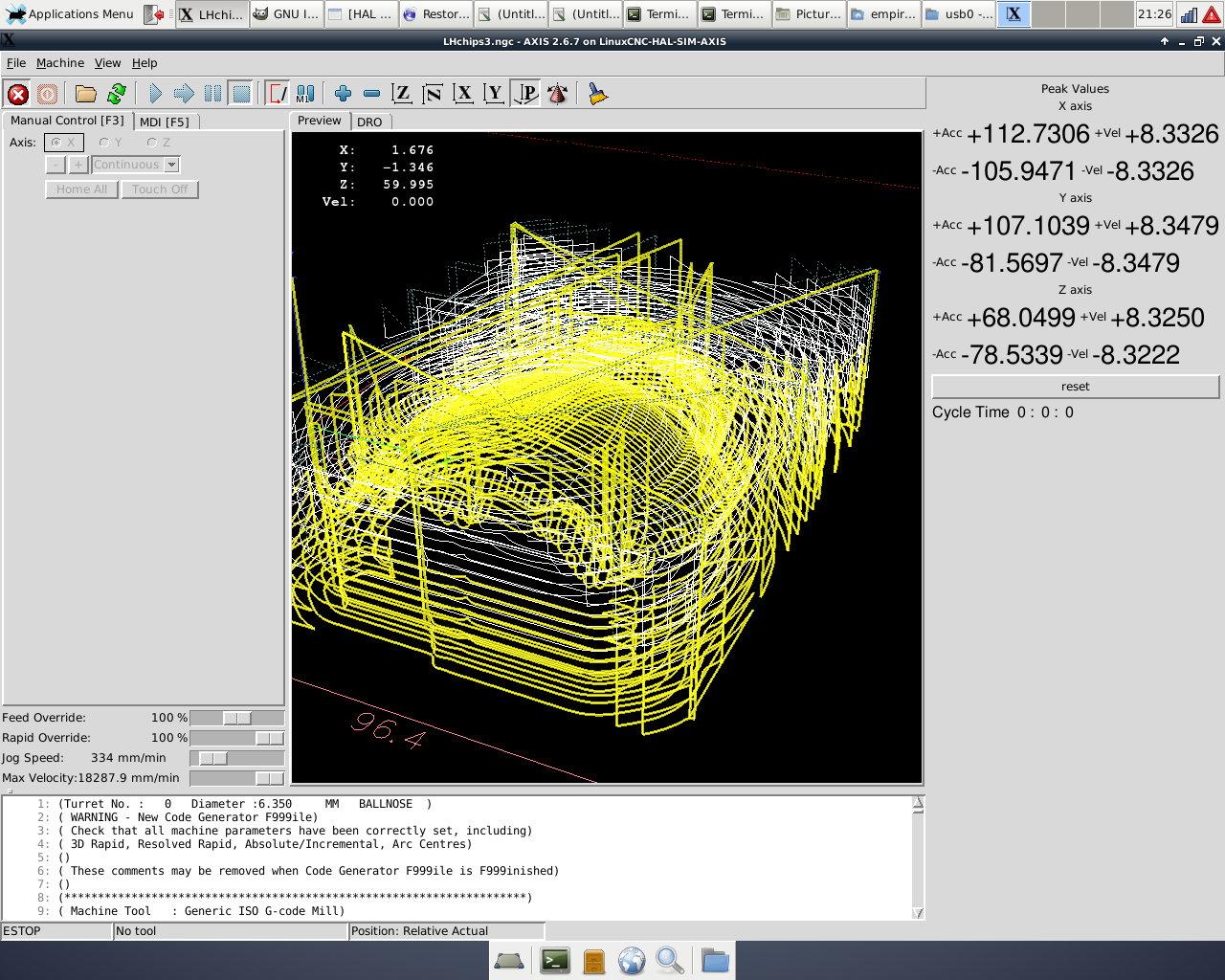
http://electronicsam.com/images/KandT/testing/grbl/machhalscope.png sam On 6/1/2015 7:51 AM, sam sokolik wrote: > I played with the grbl and an arduino uno last week. It is a pretty > neat. 3 axis with some sort of look ahead. > > https://github.com/grbl/grbl/wiki > > I flashed v0.9i and grabbed a popular gui. > > https://github.com/winder/Universal-G-Code-Sender > > I set the grbl to 30ins^2 and 500ipm. (metric is how the config is set > 768mm/s^2 and 12700mm/m) > > It has a setting for $11=0.020 (junction deviation, mm) Which has an odd > quote... > > Junction deviation is used by the acceleration manager to determine how > fast it can move through line segment junctions of a G-code program > path. For example, if the G-code path has a sharp 10 degree turn coming > up and the machine is moving at full speed, this setting helps determine > how much the machine needs to slow down to safely go through the corner > without losing steps. > > How we calculate it is a bit complicated, but, in general, higher values > gives faster motion through corners, while increasing the risk of losing > steps and positioning. Lower values makes the acceleration manager more > careful and will lead to careful and slower cornering. So if you run > into problems where your machine tries to take a corner too fast, > /decrease/ this value to make it slow down when entering corners. If you > want your machine to move faster through junctions, /increase/ this > value to speed it up. For curious people, hit this link > <http://t.co/KQ5BvueY> to read about Grbl's cornering algorithm, which > accounts for both velocity and junction angle with a very simple, > efficient, and robust method. > > anywhoo... I ran one of my test programs.. (sort of tux on steroids..) > http://electronicsam.com/images/KandT/testing/grbl/grblplot.png 10:23 min. > As you can see - consistent violations. (2X config acceleration) > The slope of the velocity really shows it. > http://electronicsam.com/images/KandT/testing/grbl/grblhalscope1.png > http://electronicsam.com/images/KandT/testing/grbl/grblhalscope2.png > > Now setting the 'junction' deviation to .1mm (.003937") > http://electronicsam.com/images/KandT/testing/grbl/grblplothigher.png > 8:07 min. > So - the deviation setting does effect the acceleration 'yeck' > > http://electronicsam.com/images/KandT/testing/grbl/grblhalscopehigher.png > > -- Running on linuxcnc > http://electronicsam.com/images/KandT/testing/grbl/linuxcnc01.png 13:28 > > there is no way I could get it to 10.23 mins. If I set linuxcnc > acceration to 60in/s^2 - the gcode program runs in 9:40. > > I didn't find any major violations in grbl (huge acc spikes) in the > testing I did (few programs) so I think it is pretty decent - just > consistently higher. > > I think trajectory planning is hard.. :) Great work Rob... > sam > > > > > > > ------------------------------------------------------------------------------ > _______________________________________________ > Emc-users mailing list > [email protected] > https://lists.sourceforge.net/lists/listinfo/emc-users > > ------------------------------------------------------------------------------ _______________________________________________ Emc-users mailing list [email protected] https://lists.sourceforge.net/lists/listinfo/emc-users
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}