before anything else, check what accuracy you get with the rover parked for a couple of hours.
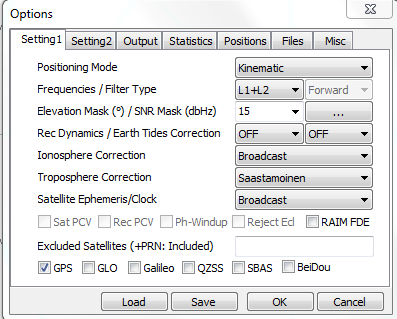
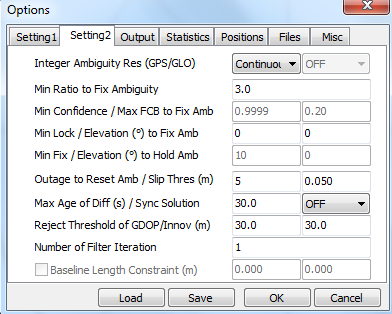
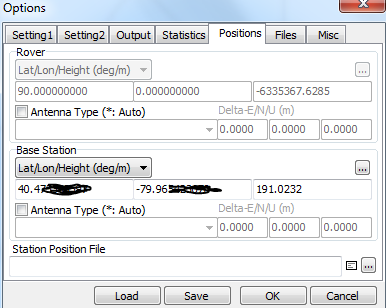
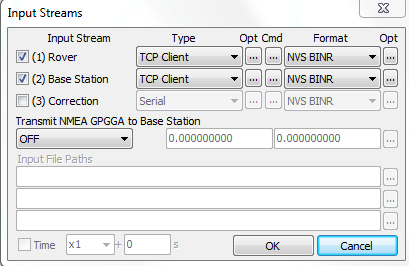
to isolate which one between rover and base is noisier, download data from the nearby CORS, then process your base versus CORS and your rover versus CORS separately. keep your base as close as possible to the rover. that's the best way to mitigate iono delay without dual-frequency tracking data. turn on the GPS on the rover for some time before it departs, as it should help with ambiguity resolution. try to elevate the antenna above the body of the robot, so as to minimize multipath and EM interference. On Wed, Sep 17, 2014 at 6:06 PM, <[email protected]> wrote: > Send FOSS-GPS mailing list submissions to > [email protected] > > To subscribe or unsubscribe via the World Wide Web, visit > http://lists.osgeo.org/mailman/listinfo/foss-gps > or, via email, send a message with subject or body 'help' to > [email protected] > > You can reach the person managing the list at > [email protected] > > When replying, please edit your Subject line so it is more specific > than "Re: Contents of FOSS-GPS digest..." > > > Today's Topics: > > 1. Mobile Robot Experimentation (Sean Hyde) > > > ---------------------------------------------------------------------- > > Message: 1 > Date: Wed, 17 Sep 2014 17:05:35 -0400 > From: "Sean Hyde" <[email protected]> > To: <[email protected]> > Subject: [FOSS-GPS] Mobile Robot Experimentation > Message-ID: <[email protected]> > Content-Type: text/plain; charset="us-ascii" > > Hey Guys, > > > > I've been playing around with RTKLib for a couple months now and have run > into some issues and I was wondering if anyone had any idea on how to > improve performance. > > > > ---Setup--- > > Base Station: > > NVS08C on custom PCB using the receiver to power the antenna > > Antenna is Taoglas Limited AA.161.301111 > ( > http://www.taoglas.com/images/product_images/original_images/AA.161.301111. > pdf) > > Antenna is on a 12" x 24" steel plate > > Connected via FTDI->USB to Rasperry Pi > > Raspberry Pi runs str2str to send the data to Windows laptop running > rtknavi > using wifi backhaul > > > > Rover: > > NVS08C on custom PCB using the receiver to power the antenna > > Antenna is Taoglas Limited AA.161.301111 > ( > http://www.taoglas.com/images/product_images/original_images/AA.161.301111. > pdf) > > Antenna is on a 18" x 18" steel plate > > Connected via FTDI->USB to Rasperry Pi > > Raspberry Pi runs str2str to send the data to Windows laptop running > rtknavi > using wifi backhaul > > > > The Rover setup is on a small mobile robot with a top speed of about 3mph. > It is in a city (Pittsburgh), but the sky is relatively unobstructed. > > > > I'm running rtknavi in Kinematic mode using only GPS, L1+L2, 15deg > elevation > mask. The position that I input for the base station is a 5 hour average > (though it seems to have lost some precision when I pasted it?). I have > tried both Continuous and Fix and Hold Integer Ambiguity Res. I'll try to > attach screen shots of rtknavi. > > > > Right now, it kind of works. I can get relatively jitter-free floats and > occasionally fixes, but these fixes don't last long and I'm not sure they > are actually globally accurate (ie: if you restart the software, you may > get > a fix, but it may be several meters from your last fix). Sometimes a fix > goes away and never seems to come back. > > > > I'm wondering if you guys have any suggestions to improve these results. > > Better antennas? (Which ones?) > > Trying to get better placement of the base station? > > Different settings in rtknavi? > > Continuous vs Fix and Hold? > > > > Thanks! > > -Sean > > > > > > -------------- next part -------------- > An HTML attachment was scrubbed... > URL: < > http://lists.osgeo.org/pipermail/foss-gps/attachments/20140917/04981835/attachment.html > > > -------------- next part -------------- > A non-text attachment was scrubbed... > Name: image001.png > Type: image/png > Size: 25680 bytes > Desc: not available > URL: < > http://lists.osgeo.org/pipermail/foss-gps/attachments/20140917/04981835/attachment.png > > > -------------- next part -------------- > A non-text attachment was scrubbed... > Name: image002.png > Type: image/png > Size: 29201 bytes > Desc: not available > URL: < > http://lists.osgeo.org/pipermail/foss-gps/attachments/20140917/04981835/attachment-0001.png > > > -------------- next part -------------- > A non-text attachment was scrubbed... > Name: image003.png > Type: image/png > Size: 26117 bytes > Desc: not available > URL: < > http://lists.osgeo.org/pipermail/foss-gps/attachments/20140917/04981835/attachment-0002.png > > > -------------- next part -------------- > A non-text attachment was scrubbed... > Name: image004.png > Type: image/png > Size: 19442 bytes > Desc: not available > URL: < > http://lists.osgeo.org/pipermail/foss-gps/attachments/20140917/04981835/attachment-0003.png > > > > ------------------------------ > > _______________________________________________ > FOSS-GPS mailing list > [email protected] > http://lists.osgeo.org/mailman/listinfo/foss-gps > > End of FOSS-GPS Digest, Vol 68, Issue 7 > *************************************** >
{kind=link}
{kind=link}
{kind=link}
{kind=link}
_______________________________________________ This message is sent to you from [email protected] mailing list. Visit http://lists.osgeo.org/mailman/listinfo/foss-gps to manage your subscription For more information, check http://wiki.osgeo.org/wiki/FOSS-GPS