This iconoclast appreciates this thread simply because symbols are only approximations of reality constrained by our limited knowledge and language.
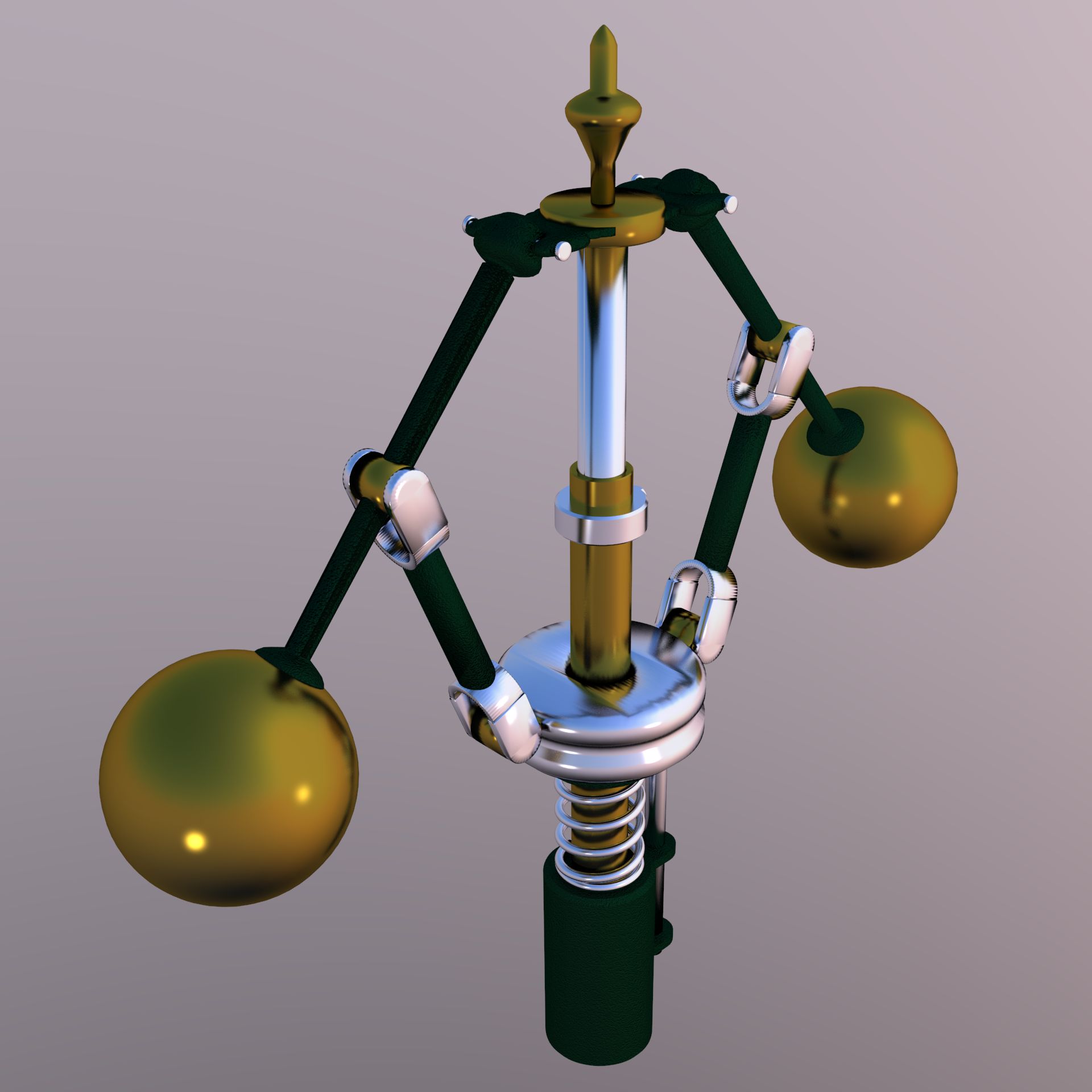
The Fly Ball imagery is startlingly profound and played a major role in my own coding efforts. I never believed that our brains contained a calculus engine of any kind. It seemed extraordinary that evolution would invest so much in this area and so little into our knees. But then I have my doubts about evolutionary design being in any way driven by idealistic precepts. I tend to think all life is driven by the needs of gut bacteria, so yes we are no more than mobile fermentation tanks. Self-flattering Representational theories have dominated academic discourse for decades and have consequently encouraged distain for the dynamical investigations in some ways slowing down innovation. It appears as if we are emerging from Nicean metaphysical debates about representational models and hurling accusations like cannon balls at any fact that alarms people. The more that is invested in representational models the more effort is funnelled into the denial of reality. vib Our neurons can only fire at rather slow intervals and only for short periods of time so human perception is a kind of peep show at best. vib Sewage systems do not require anything more elaborate. From: Friam [mailto:[email protected]] On Behalf Of Eric Charles Sent: February-14-17 11:52 AM To: The Friday Morning Applied Complexity Coffee Group Subject: Re: [FRIAM] Why depth/thickness matters Glen, Thanks for the reorientation! If you want to discuss complexity, I think an interesting question regarding perception-action systems is how much of the complexity has to be inside the organism, and how much of it can be encapsulated in the larger organism-environment system. The more the complexit is spread across the system, the more the organism can get by with much less "mental" complexity that it might originally seem. That tension is at the heart of Gibson vs. traditional theories, though, of course, Gibson described the tension in different terms. A classic example is the problem of catching a fly ball. To simplify, let the ball be flying in a vertical plane, and let the outfielder be already on that plane (there are very similar solutions to how to get onto the relevant plane, so being off-plane is just a distraction). One could imagine that the catching the ball entailed calculating a parabola-like function, based on the start point and the speed with which the ball meets the bat, then moving to the point where the calculation requires you to stand. However, a much easier solution is available: Look at the ball, if the ball is optically accelerating (i.e., moving up the visual field at an increasing speed) step backwards, if the ball is optically decelerating step forward, if the ball is moving at an optically constant speed, stay where you are and put your hand in front of your head. Everything you need to "know" what to do, is "out there" in the ambient light, and if you are a well-designed tool, getting to the right point doesn't require modeling the trajectory of the ball at all. A more modern example is in locomotive robotics. Companies like Boston Dynamics are showing that you can get basic walking movements with very little "internal computation" if you design a system that mechanically (through tension cords, springs, and the like) accomplish much of the balancing and coordination. Such robots perform much better than robots who try to handle the same types of problems in an entirely computational "central control" fashions. However, that doesn't necessarily speak to our ability to jettison "representation" and replace it with dynamic-systems accounts more generally. For that , we would probably want to go to Tony Chemero's book, which I mentioned earlier. In chapter 4 (summarized here <https://psychsciencenotes.blogspot.com/2011/03/chemero-2009-chapter-4-dynamical-stance.html#more> ), Tony presents two key examples: The first is the example of the "Watts steam governor <http://oliverstwistarts.files.wordpress.com/2009/11/watt-regulator-yafaray-002.jpg> ", which helped stop steam engines from exploding by releasing steam. It spins when steam goes through it, the spinning creates centerfugal force which raises some weighted arms, which in turn open the release valve more, keeping the internal pressure of the engine relatively constant. The second example involved an evolutionary robotics experiment at the university of Sussex, where allowed robots to "evolve" solutions to a problem, and then determined how they had done so after the fact. In both cases, Tony shows that some aspect of the system is a reasonable candidate for the label "representation", but points out that such post-hoc labeling adds nothing to the dynamic model. As Andrew and Sabrina summarize in their blog: Regarding the steam governor, "Chemero is convinced that, according to the theory of representation from Chapter 3, θ [angle of spinning arms] is a representation of ω [steam pressure] and thus there is a legitimate representational account of the governor.... Chemero is happy, however... because it is not clear the representational story adds anything to the dynamical account. Critically, the dynamical account must come first; you can't tell a traditional representational story without some idea of the function of the system, which in this case comes from the dynamical account. Given that it doesn't add anything, you might simply wish to stop with the dynamical account and not concern yourself with the representation that is in the system" And regarding the evolved robots, "Under the [old system] there is still a representational account for this robot. The system contains visual input nodes ('representation producers') which produce activations across intermediate nodes ('representations') which affect the behaviour of motors via three other nodes ('representation consumers') to produce the tracking behaviour ('adapting the system to some part of the environment'). But Chemero describes (p.77) how this representational gloss doesn't help - it could only be constructed after we had the dynamical account, and the dynamical account already provides a complete characterisation of all possible behaviours: we can use it to predict behaviour with no reference to the representational story. Taking the dynamical stance has 'paid off', and while it remains an ongoing task for dynamical systems cognitive science to actually produce these types of models, there are already numerous examples in the literature of dynamical accounts of complex behaviour which make no reference to representation. So, to recap: The questions for the list are 1) Where will we look for the complexity in question? In the organism, in the environment, or in the system that includes both? 2) Once we have a decent account of that complexity, is anything added by inserting representation-talk in the middle of it? ----------- Eric P. Charles, Ph.D. Supervisory Survey Statistician U.S. Marine Corps On Fri, Feb 10, 2017 at 10:31 AM, ┣glen┫ <[email protected]> wrote: On 02/10/2017 05:05 AM, Eric Charles wrote: > How did this all start again? Where are we going? Did I miss anything crucial? I started it because of the sentiment that we don't talk much about complexity on the list. I think you've done a great job addressing the Hoffman paper in your/Holt/Gibson context Stephen appealed to. But what concerns me most is that Hoffman (by virtue of games and simulation) has made some of the complex systems aspects of the problem explicit. Of course, I'm a simulant (or "simulationist" if you must). So I'll _always_ throw the M&S wrench into the middle of it. 8^) The tool is always more important than the use to which the tool is put. Thanks for addressing it from that context. I'll try to comment constructively after others weigh in. -- ␦glen? ============================================================ FRIAM Applied Complexity Group listserv Meets Fridays 9a-11:30 at cafe at St. John's College to unsubscribe http://redfish.com/mailman/listinfo/friam_redfish.com FRIAM-COMIC http://friam-comic.blogspot.com/ by Dr. Strangelove
{kind=link}
============================================================ FRIAM Applied Complexity Group listserv Meets Fridays 9a-11:30 at cafe at St. John's College to unsubscribe http://redfish.com/mailman/listinfo/friam_redfish.com FRIAM-COMIC http://friam-comic.blogspot.com/ by Dr. Strangelove