Here is a pretty good paper (as far as I can tell) from 2017 looking at ways to improve single frequency results: https://www.ncbi.nlm.nih.gov/pmc/articles/PMC5492347/
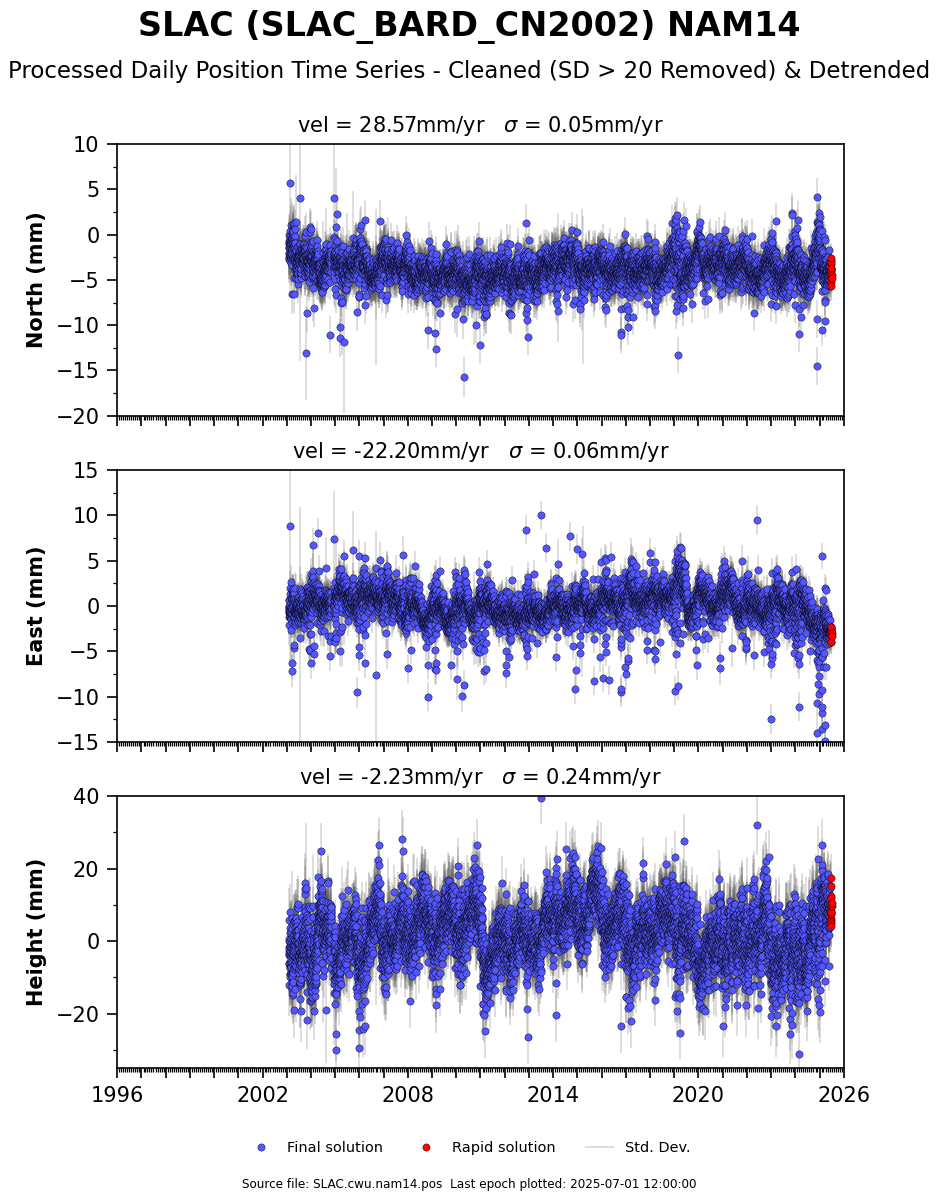
> 28. apr. 2018 kl. 06:20 skrev Jerome Blaha <[email protected]>: > > Real-time GPS <0.3m accuracy is quite possible with RTKLIB and < $35 of new > equipment, some patience, a laptop/android phone, and a real-time RTCM3 > correction station stream (free) or with post-processing using ground > stations and actual satellite path (Ephemeris). > > Disclaimer: I am neither a surveyor nor claimed GPS expert, but I play one on > TV with my day job, so consult a surveyor if you are having to survey in > WGS84 datum and convert to NAD or some other reference system, especially if > testing against old surveyed reference points. For instance here in the SF > Bay Area, the land is moving North 28.31mm/yr and West 21.87mm/yr with > respect to the WGS-84 (GPS Position) datum, which uses satellites orbits and > the earth center as their reference. If you were to survey your Telescope > position in WGS-84 in the Bay Area, wait 15 years and survey again, the > telescope will appear to have moved Northwest by 53.7cm and will have moved > down by 1.1cm (Assumptions taken from SLAC de-trended data here: > https://www.unavco.org/data/gps-gnss/derived-products/position-timeseries/SLAC_timeseries_cleaned_detrended.png) > > This is why most surveying is performed not in WGS-84 but in a datum that > remains fixed to a tectonic plate as it moves, such as NAD83. The 83 refers > to the date or year (epoch) when the land position or survey marker was at > that location, because even surveyed positions can move over time within that > same tectonic reference frame such as along fault-lines, etc. > > Getting back, RTKLIB is a brilliant piece of open-source software to allow > sub-meter (<5cm) phase-based positioning and my hat goes off to Tomoji Takasu > from Japan who wrote this and keeps updating it. Very few GPS receivers can > measure phase shift, so this is where a specialized L1 + L2 survey receiver > is needed or you find a cheap L1 GPS chip capable of raw phase and code, such > as the u-blox M6T or M8T. > > > RECEIVER: > With regards to a GPS + Glonass raw receiver, the cheapest ublox M8T > legitimate supplier seems to be over at csgshop.com in Northern Europe. He > has the real M8T GPS for $75 and I secretly believe he might also be one of > the test engineers for u-blox. I say real, because there are knock-offs on > ebay. > > Why did I mention $35? Well, you can find an M6T gps-only with raw ublox > output on Amazon and elsewhere called LEA-6T that should get the job done if > you add a metal ground plane. This little thing works surprisingly well when > tested for repeatable RTK fixes within 5cm and you can even do a real-time > RTK fixes with only an Android phone and the older RTK lib App on GooglePlay. > (M8T not supported) Don't feel you have to use a newer M8T with GPS + > Glonass, as usually a GPS-only solution will be superior to a GPS + Gloanss, > because Glonass seems to have a little more noise to it. (Discussion for > another time) > > > USGS SURVEY MARKERS > While we're at it, let's mention that there are survey points all over the > United States where you can test the accuracy of your newly working RTK GPS > system. These are markers placed by the USGS and are typically reported in > NAD or other American datum format. These must be converted to WGS-84 datum > for you to compare with GPS positions and there are tools out there if you do > a Google search for converting datums to WGS-84, just pay attention to what > year(epoch) you are converting to and it gets tricky to wrap your head around > conversion between different Ellipsoids and Geoids (ground height). > https://www.ngs.noaa.gov/NGSDataExplorer/ > > > RTKLIB: > RTKLIB has multiple tools to allow streaming, real-time, logging, > post-processing, and graphing RTK GPS fixes. Typically raw GPS (code & phase > measurements) are converted to RINEX data format before post-processing. > RINEX is a standard and allows for raw GPS code and phase measurements > between different GPS manufactures into one format for processing in > third-party software. > > RTKLIB works in Windows and is a little tough to get started with; thankfully > there is another very nice guy, Tim Everett, who has written many articles at > rtkexplorer.com on accuracy of cheap RTK gps chips interfaced with RTKLIB as > well as tutorials on getting started with pretty pictures. As a side note, > you may be tempted to try a newer ublox M8N; however many M8N chips are > firmware disabled to not give raw phase anymore without firmware hacking. > (The M8T still works with RTKLIB 2.4.3) > > > SATELLITE PATH (EPHEMERIS) > When typical GPS receivers are running in real-time, they download an > approximate ephemeris of where the satellite path flies within a meter or > two. The final ephemeris is the best true path that the GPS satellite > actually flew, down to 10cm, however these files are not available until more > than a week after you collect your raw survey by going to a government > website such as (https://www.ngs.noaa.gov/orbits/orbit_data.shtml) These > post-processed orbital paths are computed from hundred of surveyed ground > stations around the world to determine the precise track and position that > each satellite "Bird" actually flew. It's kind of like a feedback loop for > oscillator timing correction, by using ground stations to correct an unknown. > > > RTK CORRECTIONS > For more real-time applications, a surveyed RTK ground station that is nearby > your location (less than ~15km for L1 only and less than ~100km for an L1 + > L2 ) can be used. The farther you are from a reference station, the more > error you will accumulate in timing errors that cannot account as well for > clock error, tropospheric, and ionospheric delays. > > The real-time reference stations put out RTCM3 corrections which can be used > in to compute your RTK position in real-time, once ambiguities are solved. > There is one caveat in that your position is ALWAYS relative to the RTK > position of the surveyed correction station. If you put in the wrong > location of the ground station antenna, your RTK fix will be off by the same > amount. A second method is to download the RINEX & RTCM3 files for a station > and post-process your data in RTKLIB to compute a fix. It is highly > recommended to use more than one station to check your position and confirm > that they correlate within a few cenimeteres for a static point. Please note > that a real-time RTK fix with only L1 phase can take 5-30 minutes to achieve > a lock. Before locking, they will be floating and may have 1 meter or more > accuracy. > > > SURVEYED STATIONS > For a source of free NTRIP surveyed stations for the West Coast, the folks > over at UNAVCO are again awesome. If you ask very nicely or are doing > research, they will give you a free account to their hundreds of RTK > reference stations. There are also many other sources of surveyed ground > stations in you are on the East Coast. > https://www.unavco.org/data/gps-gnss/real-time/real-time.html These guys are > also worth donating to as they are set up all of these reference stations out > of pocket for free access to everyone as a non-profit university governed > consortium. > > > BIG TIPS: > 1)If you plan to run RTKLIB with real-time RTK Static fix to survey a > stationary point and use the free unavco RTCM3 correction stream, please make > sure to get the correct station position file for the station you plan to use > and manually enter the most current computed Lat/Lon/Height into RTKNAVI, > because if you accidentally click the option to get the station Lat/Lon > decoded from the RTCM3 stream, your RTK position will have error of the last > time someone updated the RTCM3 streamed station position. > > 2)If you purchase a ublox-M8N or M8T it will not work with the older RTKLIB > 2.4.2 because they changed the raw stream name, you will need a compiled > version of the beta 2.4.3 to work. (There is one on the rtkexplorer site) > > 3)Don’t forget a ground plane. A dinky $5 GPS puck can do surprisingly well > <5cm repeatable accuracy with a nice circular metal ground plane made of > perhaps 15cm or more circular metal underneath. (Just beware of something > called cycle slip and don't trust the very first RTK fix until it stabilized > for a while) > > If you missed everything above, start with > http://rtkexplorer.com/how-to/posts-getting-started/ and go from there. > > IN MEMORIAM: The GNSS community recently lost a very bright star, Per Eng, > Ph.D. He was a GPS Stanford Lab professor, whom worked to improve the GNSS > standards and safety that are used around the world today. He will be > greatly missed and his life work can still be found in online GNSS lectures > and publications. > > -Jerome > _______________________________________________ > time-nuts mailing list -- [email protected] > To unsubscribe, go to https://www.febo.com/cgi-bin/mailman/listinfo/time-nuts > and follow the instructions there. _______________________________________________ time-nuts mailing list -- [email protected] To unsubscribe, go to https://www.febo.com/cgi-bin/mailman/listinfo/time-nuts and follow the instructions there.
{kind=link}