(I posted some of these in the Penon topic -- I have to redo all the pictures for the web version).
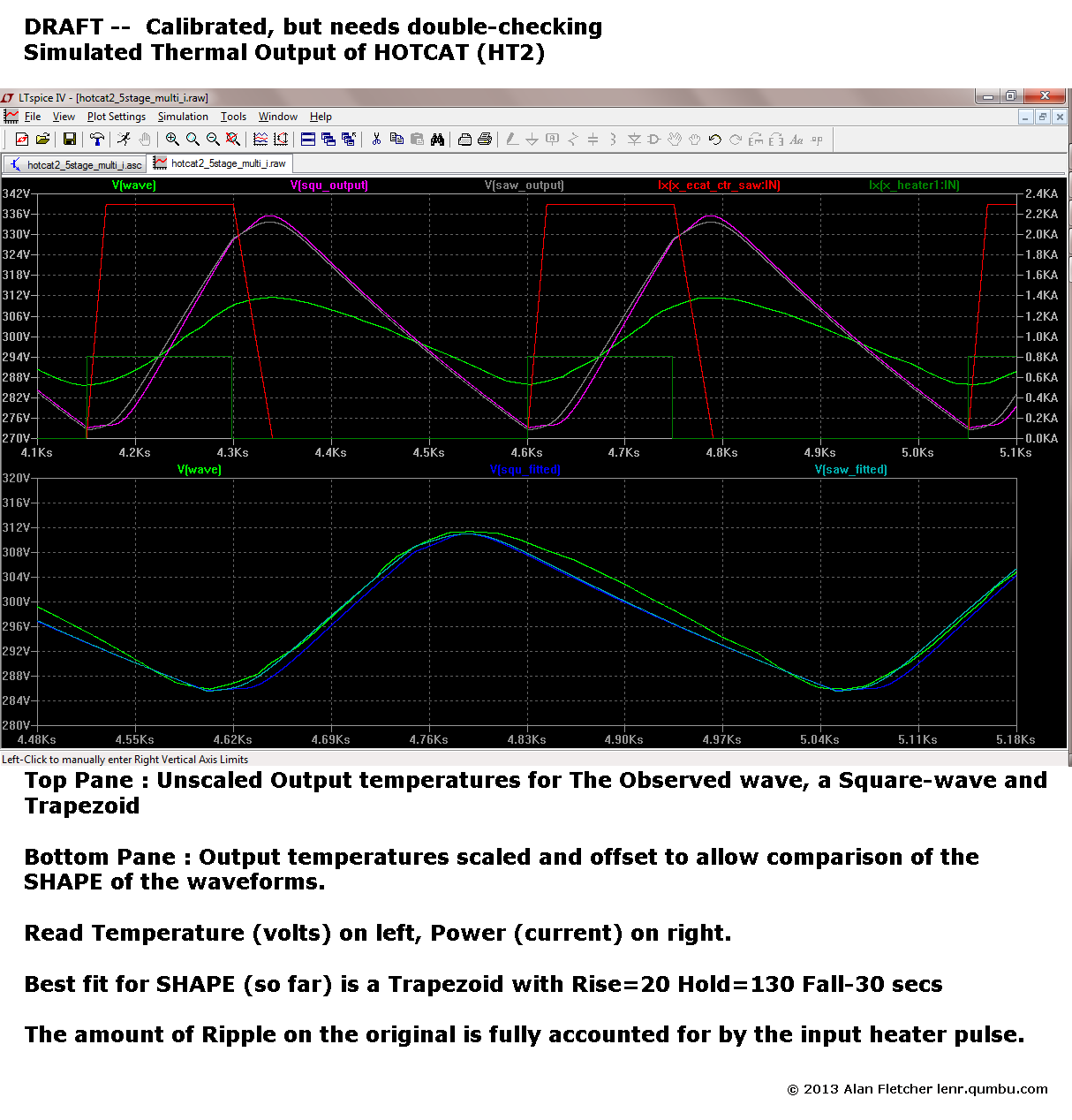
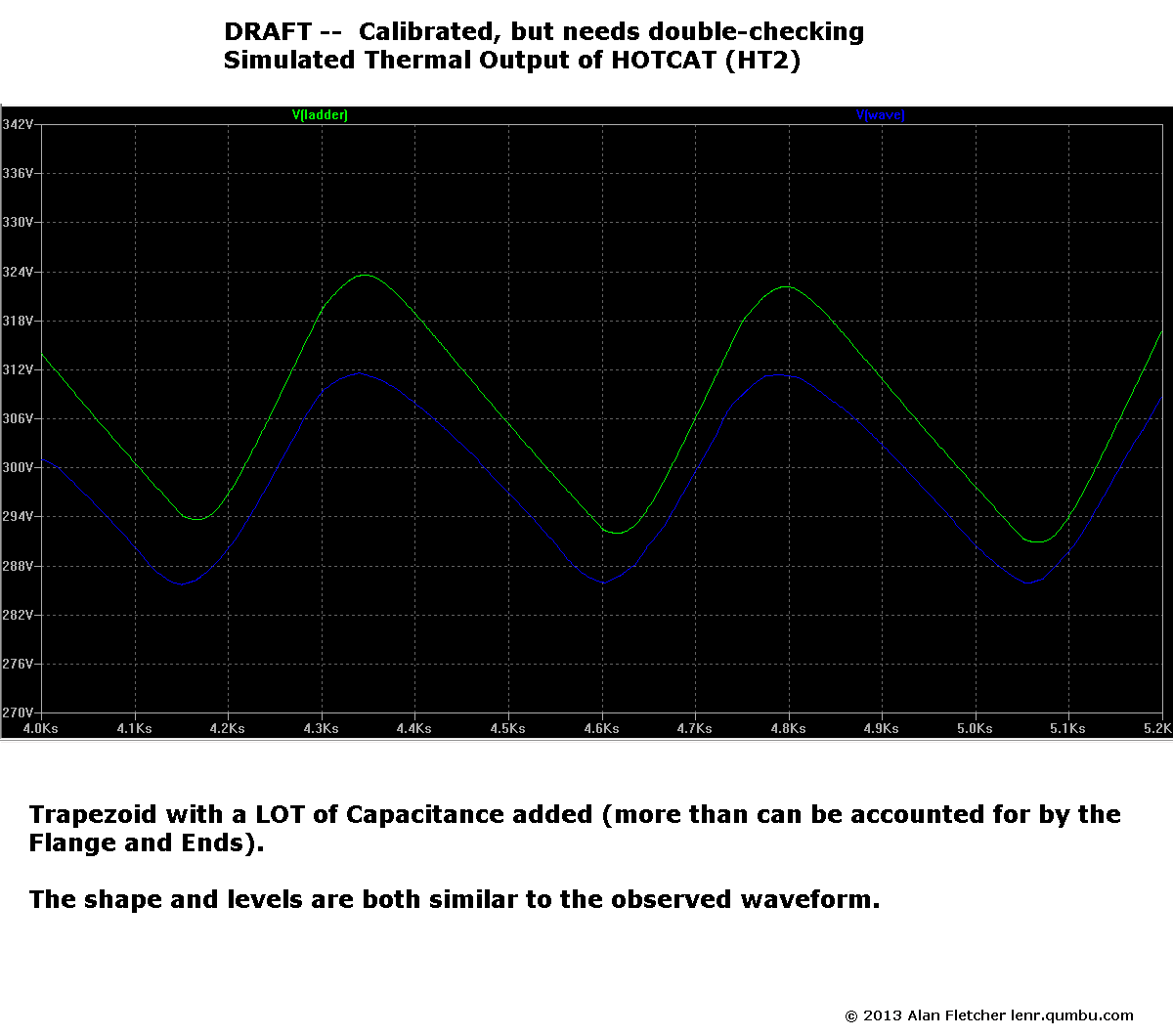
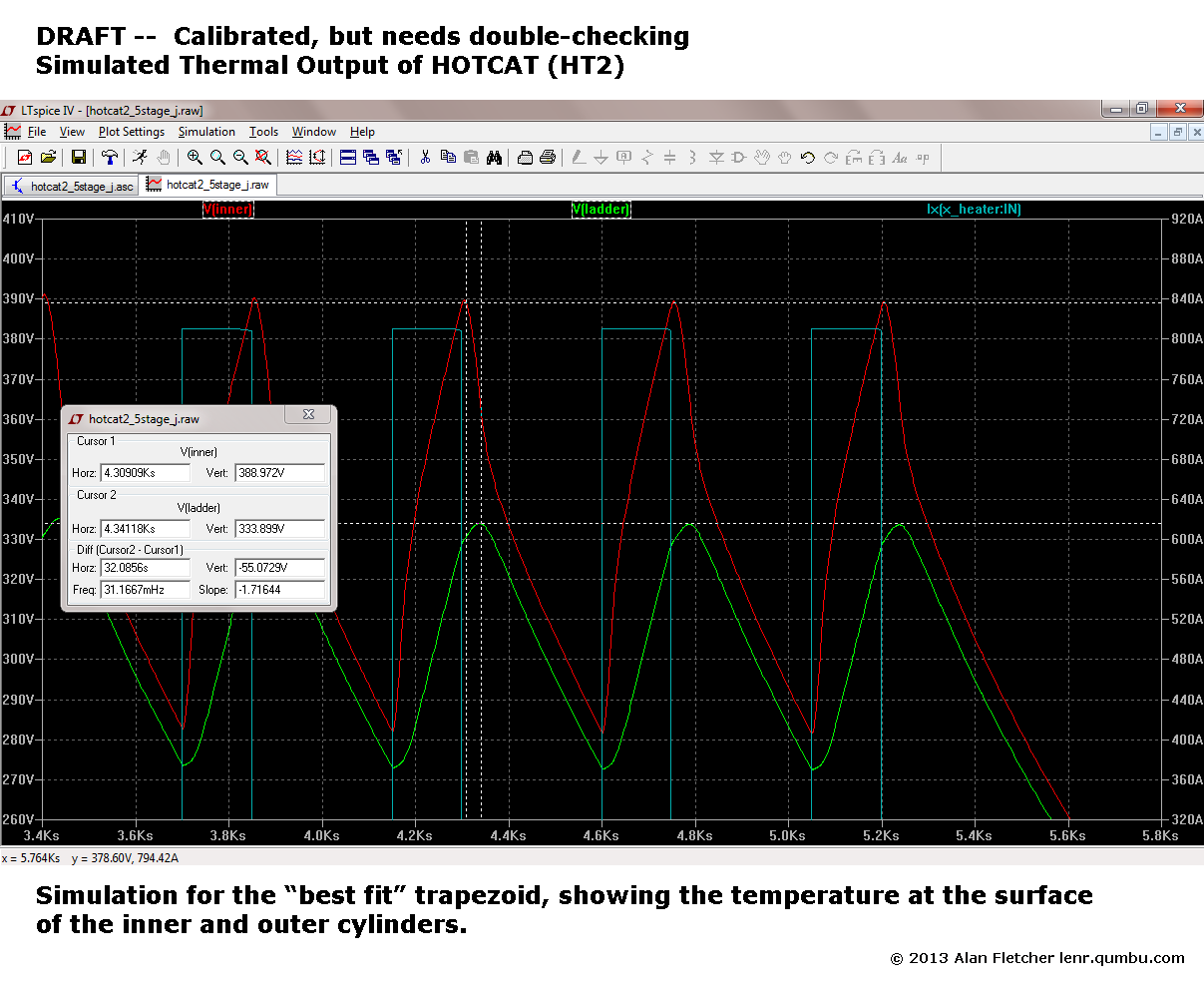
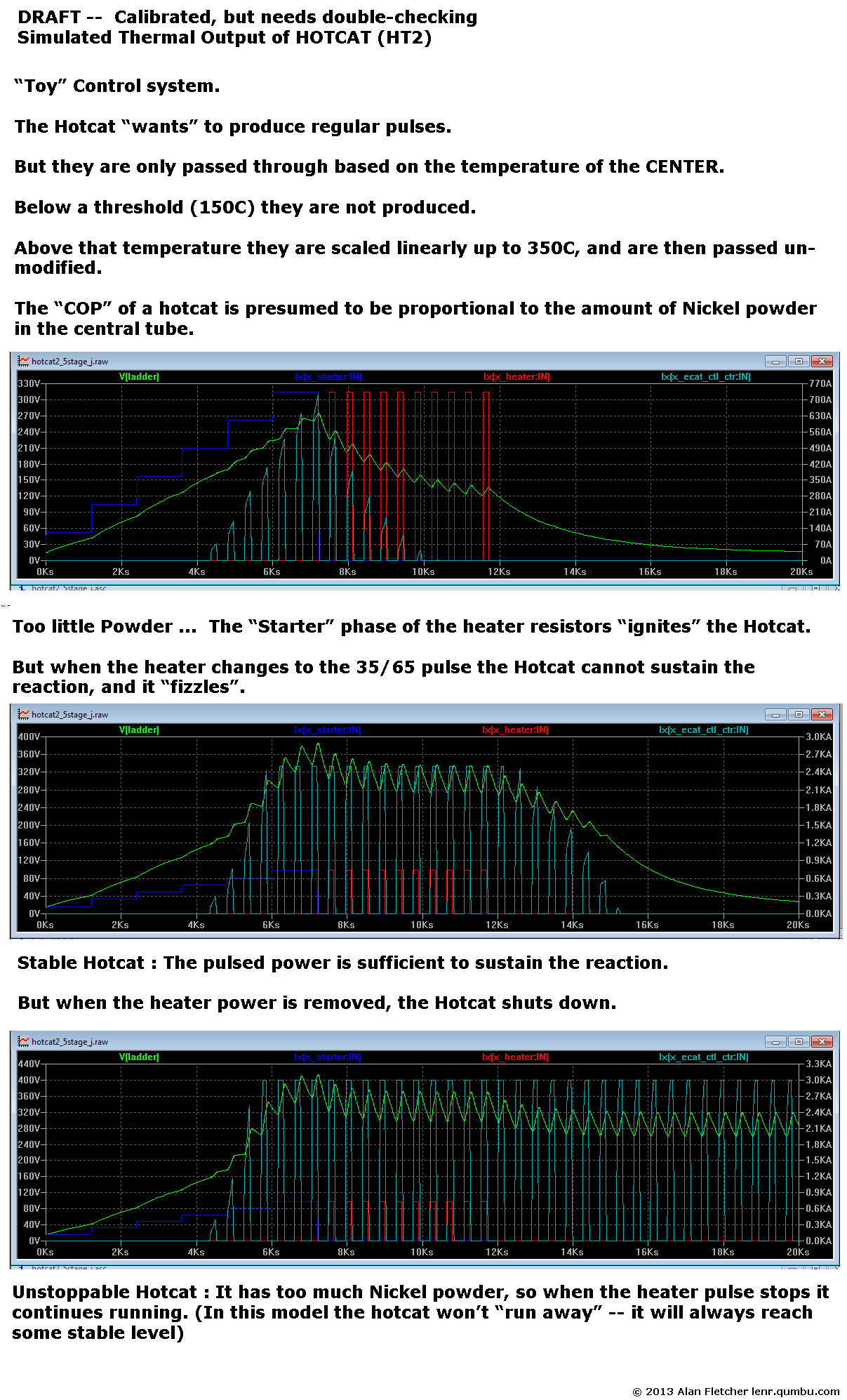
My current "best fit" for the waveforms is an almost-trapezoid Rise=20 Hold=130 Fall=30 http://lenr.qumbu.com/web_hotcat_spice/130625_spice_01.png I've done a "good enough" digitization of the original waveform. Note that the amount of ripple in the waveform is fully accounted for by the input square-wave pulse. Any other ripple is additive. The only other explanation is that there's more "RC" in the circuit than in my model, which would cause the signal to "hold" longer at the tail. There is some RC in the flange and the ends .. but they also provide a path for pulling it down. http://lenr.qumbu.com/web_hotcat_spice/130625_spice_03.png And for that waveform, these are the temperatures at the inner and outer steel cylinders. http://lenr.qumbu.com/web_hotcat_spice/130625_spice_02.png There's only a 55C difference between the two. I expected it to be much higher. (The reason is that corundum is a good thermal conductor). The following is an ILLUSTRATION of a "Toy" control system, in which the Hotcat requires a threshold center temperature before it fires (150C), increases linearly up to 350C and then stays constant (and therefore won't increase exponentially). It shows how the addition of the "pulse" heat allows the reaction to continue, but withdrawing it causes it to stop. http://lenr.qumbu.com/web_hotcat_spice/130625_spice_10_12.png (I don't attempt to explain how the pulses of Hotcat energy are formed, or are synchronized with the heater pulse).
{kind=link}
{kind=link}
{kind=link}
{kind=link}