On Mon, 17 Oct 2011, Tom Easterday wrote: > Date: Mon, 17 Oct 2011 08:40:24 -0400 > From: Tom Easterday <[email protected]> > Reply-To: "Enhanced Machine Controller (EMC)" > <[email protected]> > To: "Enhanced Machine Controller (EMC)" <[email protected]> > Subject: Re: [Emc-users] config without encoders > > This really appears to be a bug in either the Mesa stepgen or EMC, or both. > Anyone with a Mesa card ought to be able to reproduce this. > > I went to the shop last night to work on it some more. It turns out this > happens without the Granite's involved at all. We have them turned off - no > motors moving. We have EMC configured to ignore encoder feedback, it is > just set for position feedback and so should not be able to generate ANY > following error. But it does. Anyone should be able to reproduce this > problem if they have 2.4.6 thru 2.4.7, a Mesa 7i43 (at least), and a D510MO > motherboard (but I doubt that if matters). Currently we cannot get the > following error be less than 0.003". It seems like a bad place to start > tuning a servo when you have 0.003" in following error before you even turn > on your motors/encoders!!
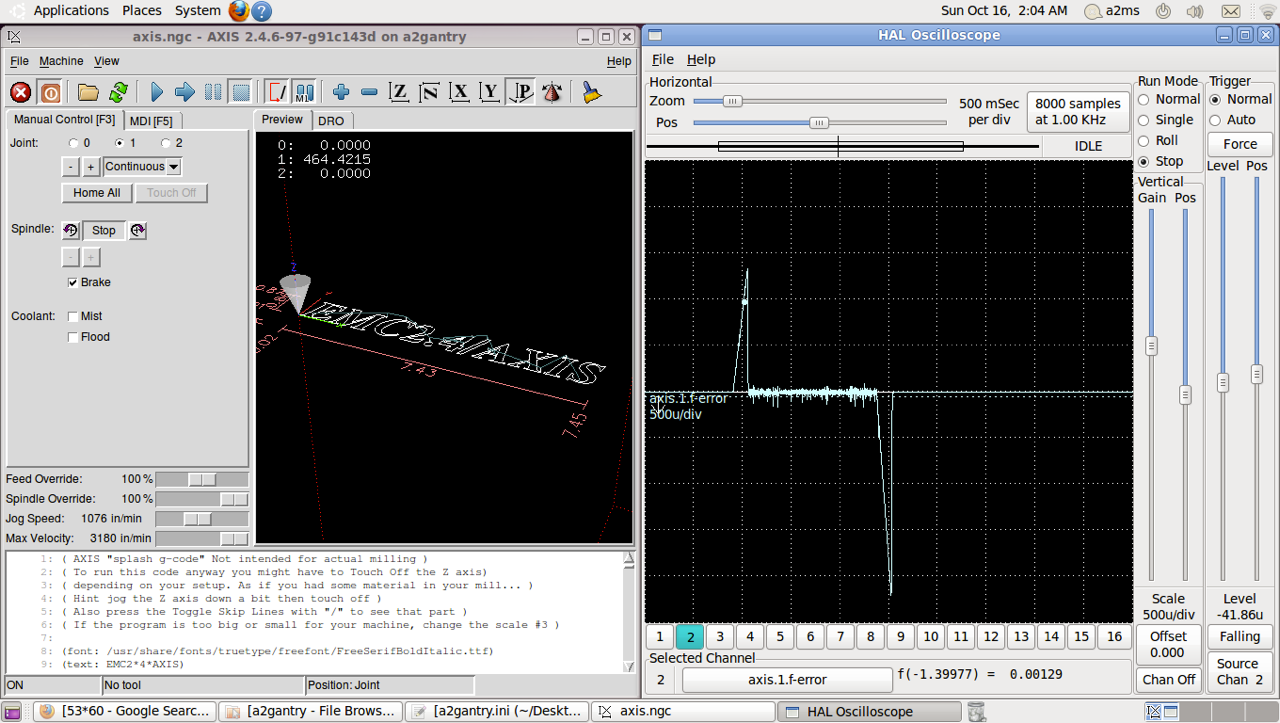
Actually that sounds very good! You have an acceleration of 300 IPS/S and a slew velocity of 50 IPS (that is .050" per servo thread) I would not be at all surprised that the following error can not be improved (at least at 1KHz sample rate and the Step generator driver tha is not optomized for such high accelerations and velocities). Like I said before, you might have better luck using a normal PID loop at these speeds (this amounts to taking your encoder config, disconnecting the encoder feedback to the PID component and connecting the stepgens feedback in place of the encoder feedback. With a PID loop you have the FF2 parameter avaialble to tune out the lag on acceleration > > We have tried many combinations of max_acceleration and max_velocity for > both EMC (TRAJ section) and in the Axis (Y in our case) we are jogging. > The last settings we were using are pastebin'd below - but keep in mind we > have tried a wide range of values. The procedure we use is: Start EMC and > enable (out of estop, and on), set jog slider to a high value (say 3000 > ipm). Run Hal Scope and watch f-error on the axis of interest (single > capture, normal triggering), to to Axis window and jog up, down, up at any > rate you like. You will see following error, well, we do anyway (like this > http://bgp.nu/~tom/pub/Screenshot2.png). > > The configs are below. We are using the first Y axis (Y or Y1), the rest > can essentially be ignored, so don't point out errors on other axes... > > .ini file: > http://pastebin.com/LBzMdK1q > > .hal file: > http://pastebin.com/b3Vg5qL8 > > -Tom > > On Oct 17, 2011, at 5:30 AM, andy pugh wrote: > >> On 16 October 2011 15:20, Andy Pugh <[email protected]> wrote: >> >>> I would be looking at the position loop in the drive for that problem. As >>> far as EMC2 is concerned it is driving an open-loop stepper system. >> >> (waves hand) >> I still think this is a problem with the Granite tuning... >> >> Does stepgen ever overshoot then return? I can't see any reason why it >> should. >> I can imagine that if the trajectory planner's idea of the max accel >> differs from the stepgens, then the planner might start to decell >> later than the stepgen can manage (or is allowed to), but I don't >> think that the stepgen will then count back to the setpoint? >> >> The Granite drives are where the position loop is closed, and this >> sounds to me like a position loop tuning problem. >> >> -- >> atp >> "Torque wrenches are for the obedience of fools and the guidance of wise men" >> >> ------------------------------------------------------------------------------ >> All the data continuously generated in your IT infrastructure contains a >> definitive record of customers, application performance, security >> threats, fraudulent activity and more. Splunk takes this data and makes >> sense of it. Business sense. IT sense. Common sense. >> http://p.sf.net/sfu/splunk-d2d-oct >> _______________________________________________ >> Emc-users mailing list >> [email protected] >> https://lists.sourceforge.net/lists/listinfo/emc-users > > > ------------------------------------------------------------------------------ > All the data continuously generated in your IT infrastructure contains a > definitive record of customers, application performance, security > threats, fraudulent activity and more. Splunk takes this data and makes > sense of it. Business sense. IT sense. Common sense. > http://p.sf.net/sfu/splunk-d2d-oct > _______________________________________________ > Emc-users mailing list > [email protected] > https://lists.sourceforge.net/lists/listinfo/emc-users > Peter Wallace Mesa Electronics (\__/) (='.'=) This is Bunny. Copy and paste bunny into your (")_(") signature to help him gain world domination. ------------------------------------------------------------------------------ All the data continuously generated in your IT infrastructure contains a definitive record of customers, application performance, security threats, fraudulent activity and more. Splunk takes this data and makes sense of it. Business sense. IT sense. Common sense. http://p.sf.net/sfu/splunk-d2d-oct _______________________________________________ Emc-users mailing list [email protected] https://lists.sourceforge.net/lists/listinfo/emc-users
{kind=link}