On Oct 17, 2011, at 3:18 PM, Peter C. Wallace wrote: > Well its not optomized for extremely fast acceleration (300 IPS/S is FAST)
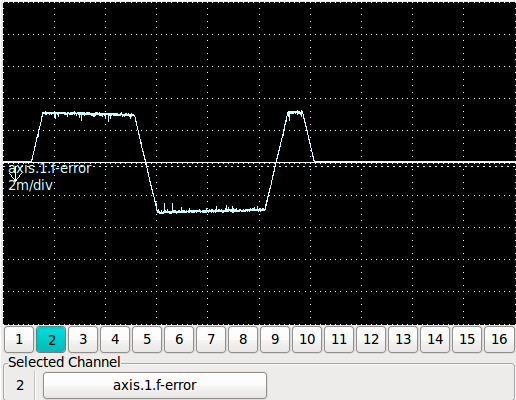
What do you consider less than extreme that we might try? We like fast by the way. It gets to it's business faster that way :-) > I dont think you understood what I said above, I was not asking to you to go > back to encoders but rather to close the stepgen position loop with a PID > component that has as its inputs the commanded position from EMC (as before) > but substitute the encoder postion input with the stepgens feeback position > > This has the advantage of a more complete control loop than provided by the > Stepgen position mode driver Ah, yes. You mentioned this before and we tried it but kept getting immediate f-error in emc. I think I had the config wrong. This is what I have now that seems to work (sort of…): http://bgp.nu/~tom/pub/hal-y-snip And this is the graph I get doing the same procedure: http://bgp.nu/~tom/pub/velocity-pid.png The same amount of f-error, as before, just less spiky…. -Tom ------------------------------------------------------------------------------ All the data continuously generated in your IT infrastructure contains a definitive record of customers, application performance, security threats, fraudulent activity and more. Splunk takes this data and makes sense of it. Business sense. IT sense. Common sense. http://p.sf.net/sfu/splunk-d2d-oct _______________________________________________ Emc-users mailing list [email protected] https://lists.sourceforge.net/lists/listinfo/emc-users
{kind=link}