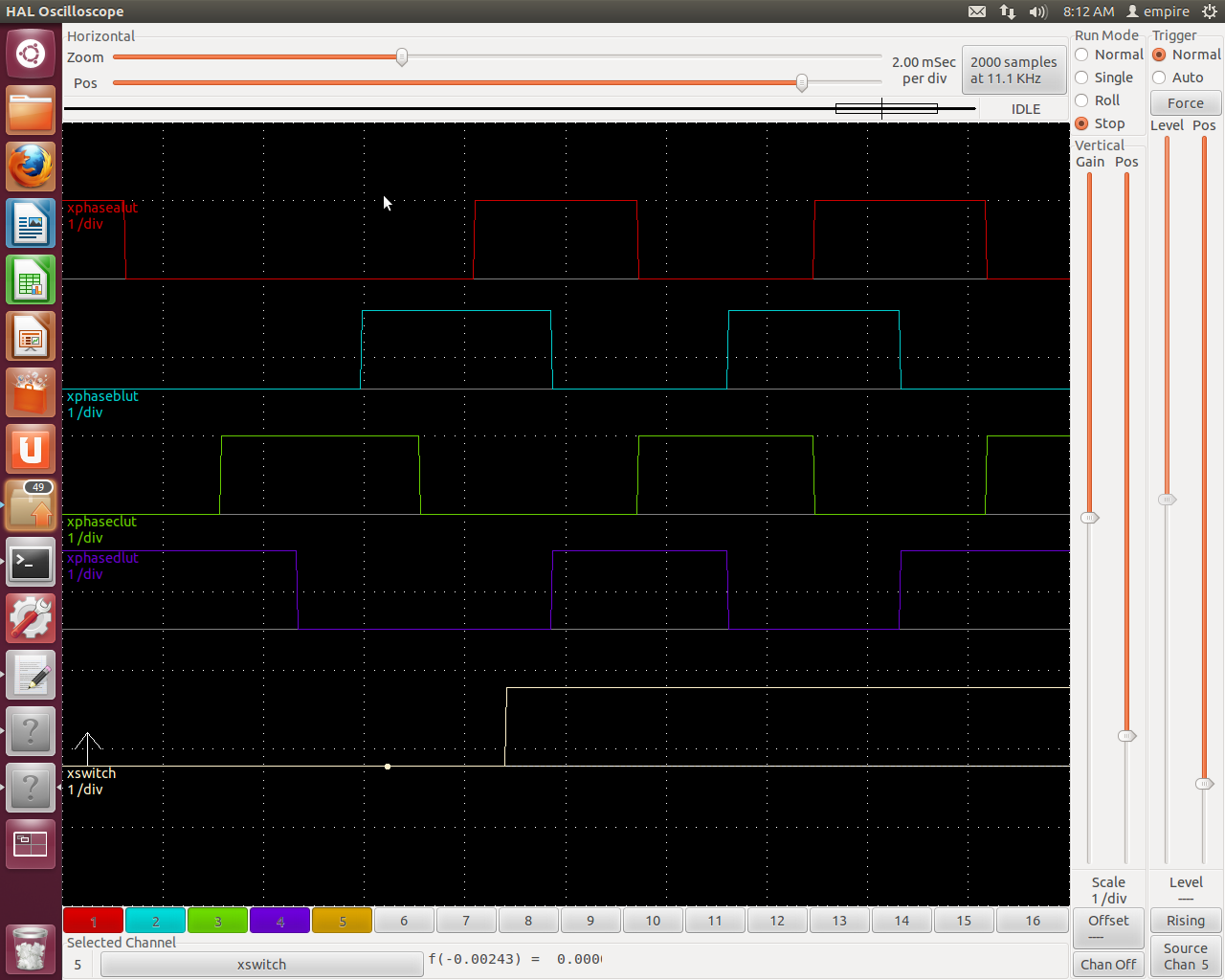
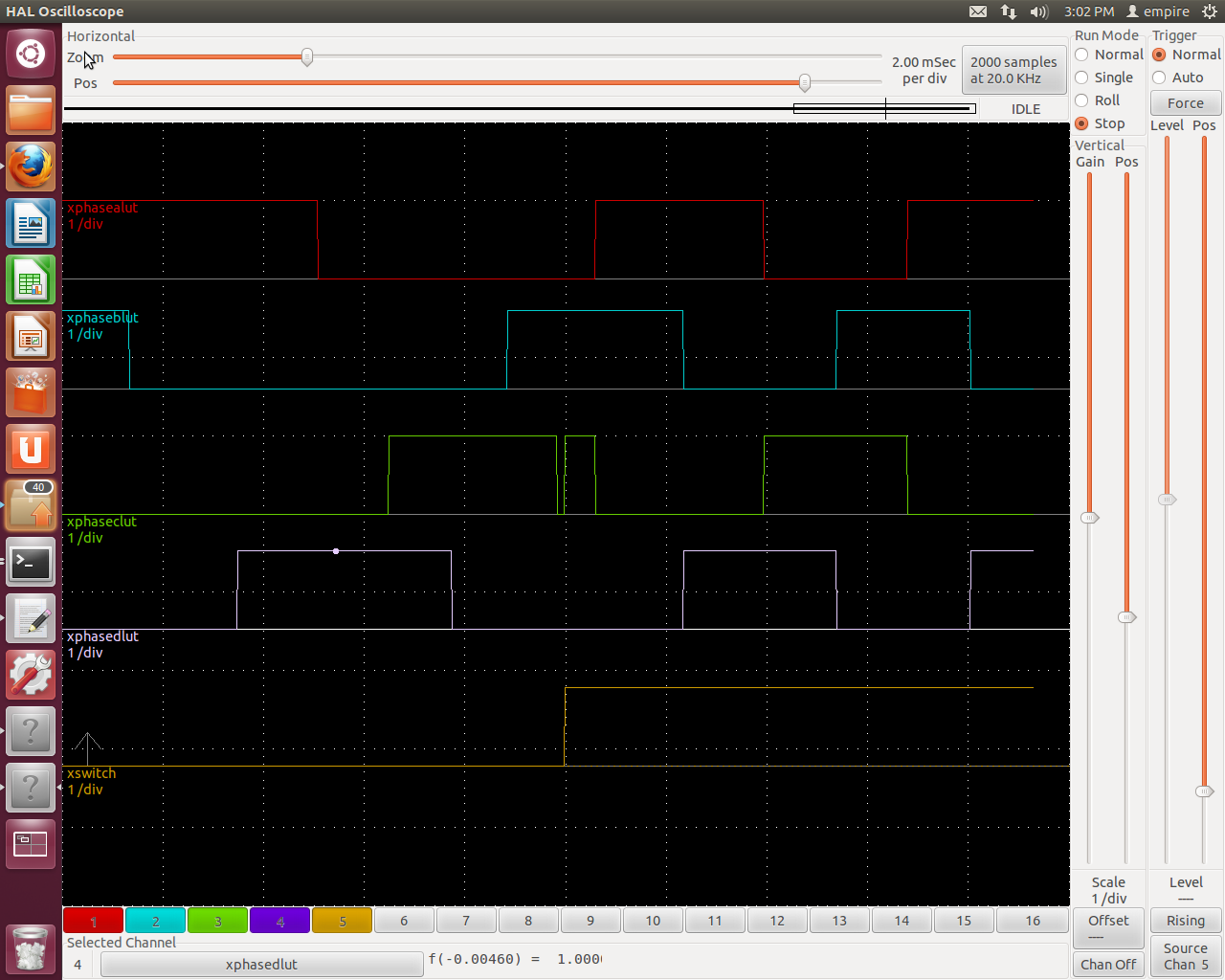
A little tweaking - better alignment I think. (not that it was causing issues - so far so good)
http://www.electronicsam.com/images/emco/betterstep.png left side half step - right side full step. (triggered by a velocity threshold.. - xswitch) On 7/18/2013 4:49 PM, Marcus Bowman wrote: > On 18 Jul 2013, at 22:15, sam sokolik wrote: > >> So - as far as I can tell - the original control did 1/2 stepping up to >> about 19ipm - then full stepping from there to 30ipm. Now the lathe >> runs fine on full stepping from 0 to 40 (maybe 45)ipm. Half stepping >> only works well up to 20ipm-ish. (stalls above that) >> >> But why stop there.. >> >> I started thinking about if linuxcnc could do that.... (without coding >> anything) >> >> A couple advantages of halfstepping.. >> 1 higher resolution 0.000273403/step vs 0.000546806 per step >> 2 reduced resonance.. (I have not run into this with full stepping on >> the lathe) >> >> Then at normal cutting speeds - < 16ipm you get a higher resolution. >> >> So why not have 2 stepgens running. One that half steps (type 9) with >> input scale of 3657.6073152 and the other full stepping (type 6) with a >> scale of 1828.8036576 (lathe calculation - metric screws) >> Then switch between the two stepgens at a specific feed (I picked 16ipm >> with a hysteresis of 1ipm) > Nice. > That's pretty much what the Gecko drives do when they morph, I think. Works > well. > > http://www.geckodrive.com/support/application-notes/step-drives/how-morphing-works.html > > But your method is simpler and much cheaper. > > Marcus > >> All I can say is - HAL IS AWESOME >> I setup a Lut5 with Jeff E's help (thanks jeff!) that switches the >> printer port between the 2 stepgens. >> A offset componant was used between the 2 stepgens to better align the >> phasing. (not tweeked 100% yet) but we jogged it around - could not >> tell that it was switching between the 2 stepgens and it always came >> back to 0. >> there is a bit more than that.. (ddt for calculating the axis velocity, >> abs of that, comp w/hystorisis, and stuff I have forgotten already.) >> >> >> And here is a halscope capture. Left side is halfstepping - right side >> is full stepping. The trigger is the velocity threshold. >> http://www.electronicsam.com/images/emco/Screenshot.png >> >> I think the offset could be tweaked more scientifically to maybe get rid >> of the blip. But as it is running the 4 phases directly - it didn't >> seem to effect the motion. >> >> here is the initial configs. >> >> http://www.electronicsam.com/images/emco/linuxcnc_configs/full-half_step_test/ >> >> again - jmk and everyone that has worked on hal - Very very awesome work! >> >> sam >> >> > > ------------------------------------------------------------------------------ > See everything from the browser to the database with AppDynamics > Get end-to-end visibility with application monitoring from AppDynamics > Isolate bottlenecks and diagnose root cause in seconds. > Start your free trial of AppDynamics Pro today! > http://pubads.g.doubleclick.net/gampad/clk?id=48808831&iu=/4140/ostg.clktrk > _______________________________________________ > Emc-users mailing list > [email protected] > https://lists.sourceforge.net/lists/listinfo/emc-users > > ------------------------------------------------------------------------------ See everything from the browser to the database with AppDynamics Get end-to-end visibility with application monitoring from AppDynamics Isolate bottlenecks and diagnose root cause in seconds. Start your free trial of AppDynamics Pro today! http://pubads.g.doubleclick.net/gampad/clk?id=48808831&iu=/4140/ostg.clktrk _______________________________________________ Emc-users mailing list [email protected] https://lists.sourceforge.net/lists/listinfo/emc-users
{kind=link}
{kind=link}