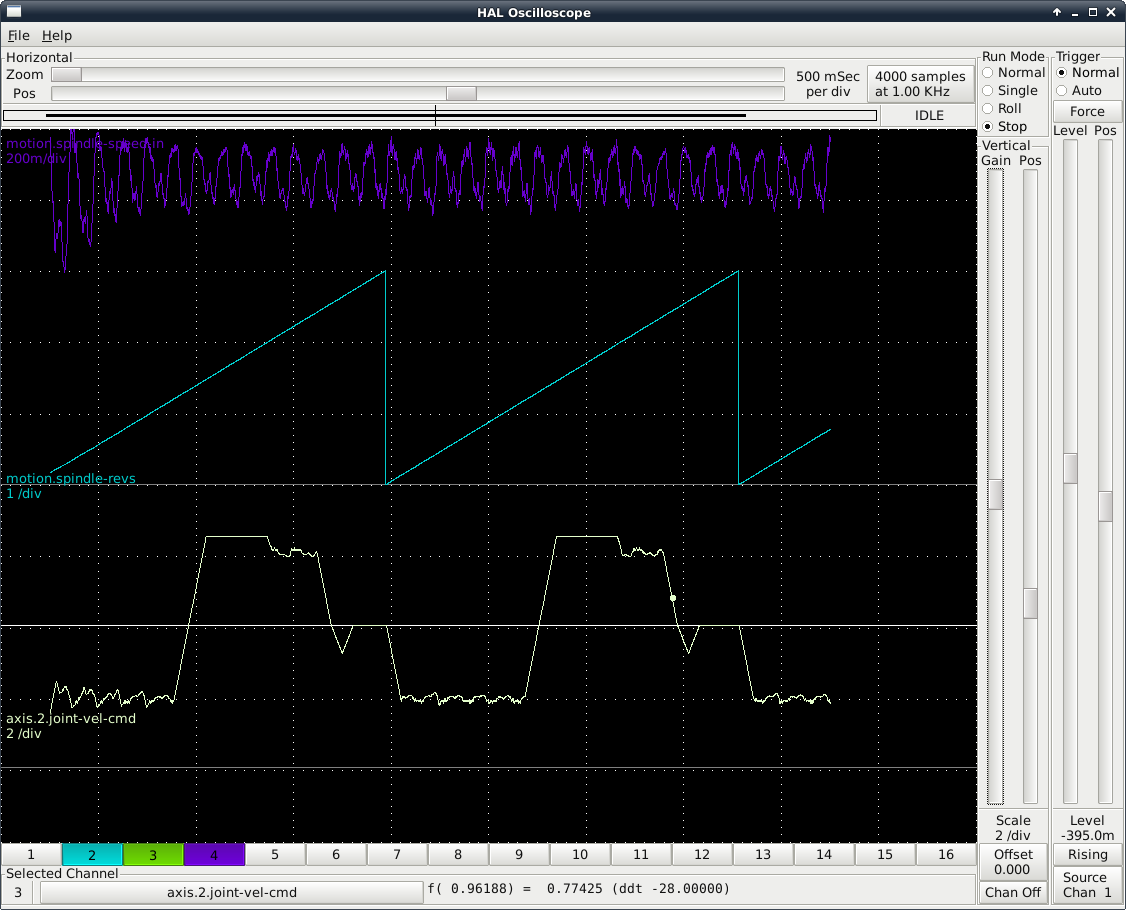
On 09/10/2015 10:00 AM, Tom Easterday wrote: > Sorry, that was the plot when using G1 (smooth). Here is the plot using G33, > notice all the noise on the joint velocity command: > http://bgp.nu/~tom/pub/noise-velocity-G33.png > -Tom > > Why is the command jumping all over the place? It appears that it is running open-loop LESS than half of the time. When the command has little waves it seems to be closed-loop, then it jumps to some limit value on the other side of zero for a while, then bounces around and goes back to closed loop for a bit.
{kind=link}
I think maybe you need to slow down or reduce the gain of the servo loop response quite a bit to make this stable. The VFD sure can't respond to a complete reversal of direction more than once a second. Jon ------------------------------------------------------------------------------ Monitor Your Dynamic Infrastructure at Any Scale With Datadog! Get real-time metrics from all of your servers, apps and tools in one place. SourceForge users - Click here to start your Free Trial of Datadog now! http://pubads.g.doubleclick.net/gampad/clk?id=241902991&iu=/4140 _______________________________________________ Emc-users mailing list [email protected] https://lists.sourceforge.net/lists/listinfo/emc-users