The diagram is here: https://forum.linuxcnc.org/media/kunena/attachments/16648/Mauriceservo.jpg
{kind=link}
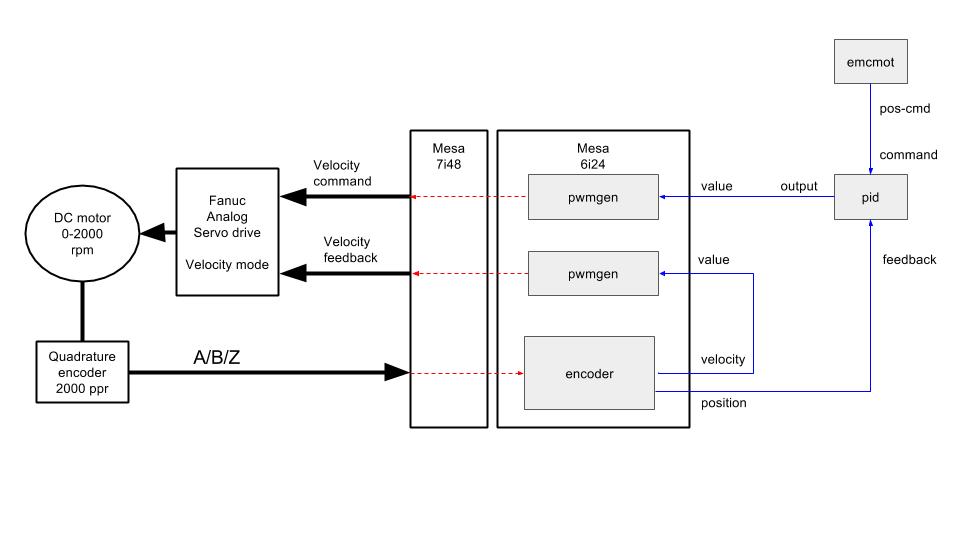
Actually, modifying the drive to get access to torque mode is something we would like to avoid. Designing an external pulse to velocity converter as well. This is why we are thinking about using mesa to implement this function. Depending on latency for this operation, we may experience additional stability issue in the loop. Frederic. On 17/09/2016 15:43, andy pugh wrote: > On 17 September 2016 at 10:20, Frederic RIBLE <fri...@teaser.fr> wrote: > >> We would like to replace the controller with a Mesa 7i48/6i24 combination. >> We plan to use one pulse encoder input to make the frequency to voltage >> conversion and generate the velocity feedback for the drive. >> > You could use two output channels per drive from any of the servo control > cards, one for velocity command, and one for velocity feedback. > But, when you think about it, both are updated from the same source at the > same time, and there is no extra information in the second channel. > > What you might find works perfectly well is to short out one or other of > the command and feedback channels and to control the other conventionally. > > The only way to gain any benefit from the internal velocity loop in the > drive is if the velocity feedback updates more rapidly than the LinuxCNC > command channel. And the only ay I see to do that is with an external > hardware board, as originally used. > ------------------------------------------------------------------------------ _______________________________________________ Emc-users mailing list Emc-users@lists.sourceforge.net https://lists.sourceforge.net/lists/listinfo/emc-users