On Fri, Mar 06, 2015 at 06:11:25PM +0100, Miroslav Lichvar wrote: > On Fri, Mar 06, 2015 at 04:05:08PM +0100, Richard Cochran wrote: > > There are really two issues: > > > > 1. The filter algorithm itself. > > 2. How the new filter fits into the SW design. > > > > Although I am not convinced about #1 > > Not convinced that the raw offset should be sent to the servo when the > number of remote and local timestamps is balanced?
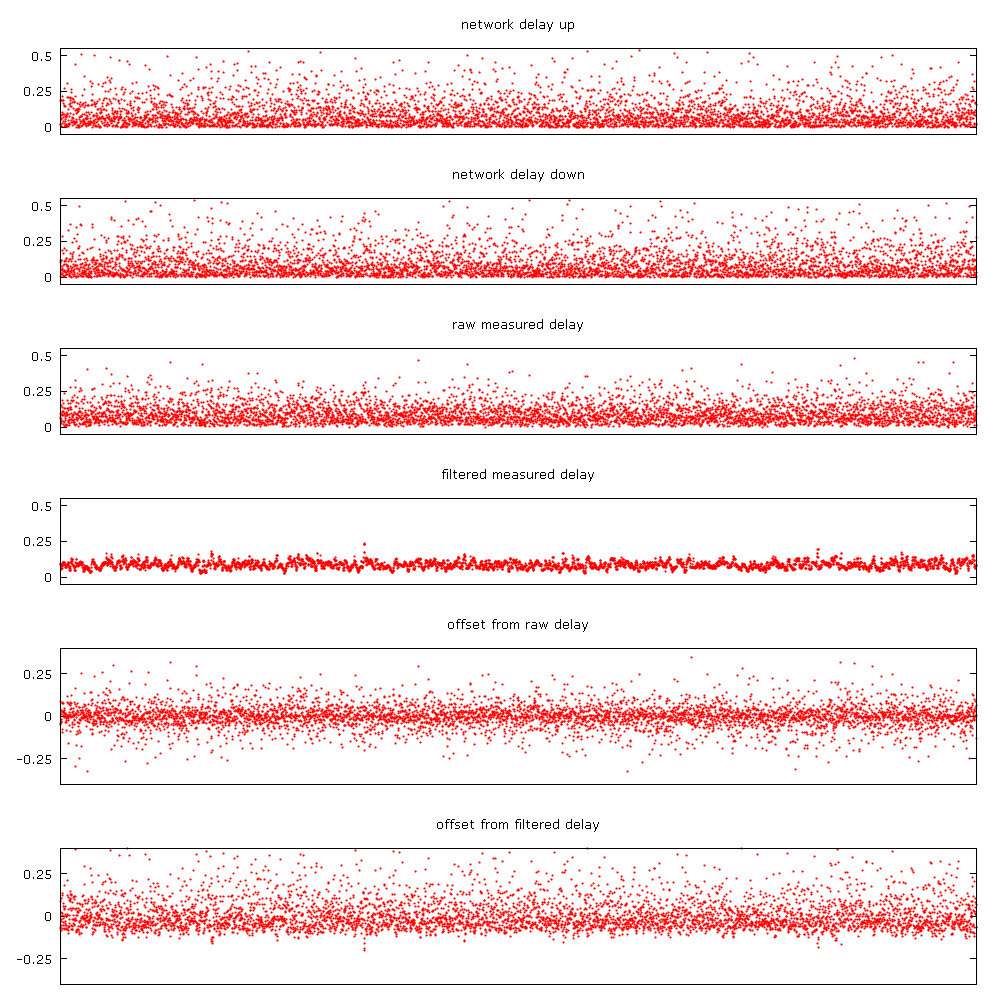
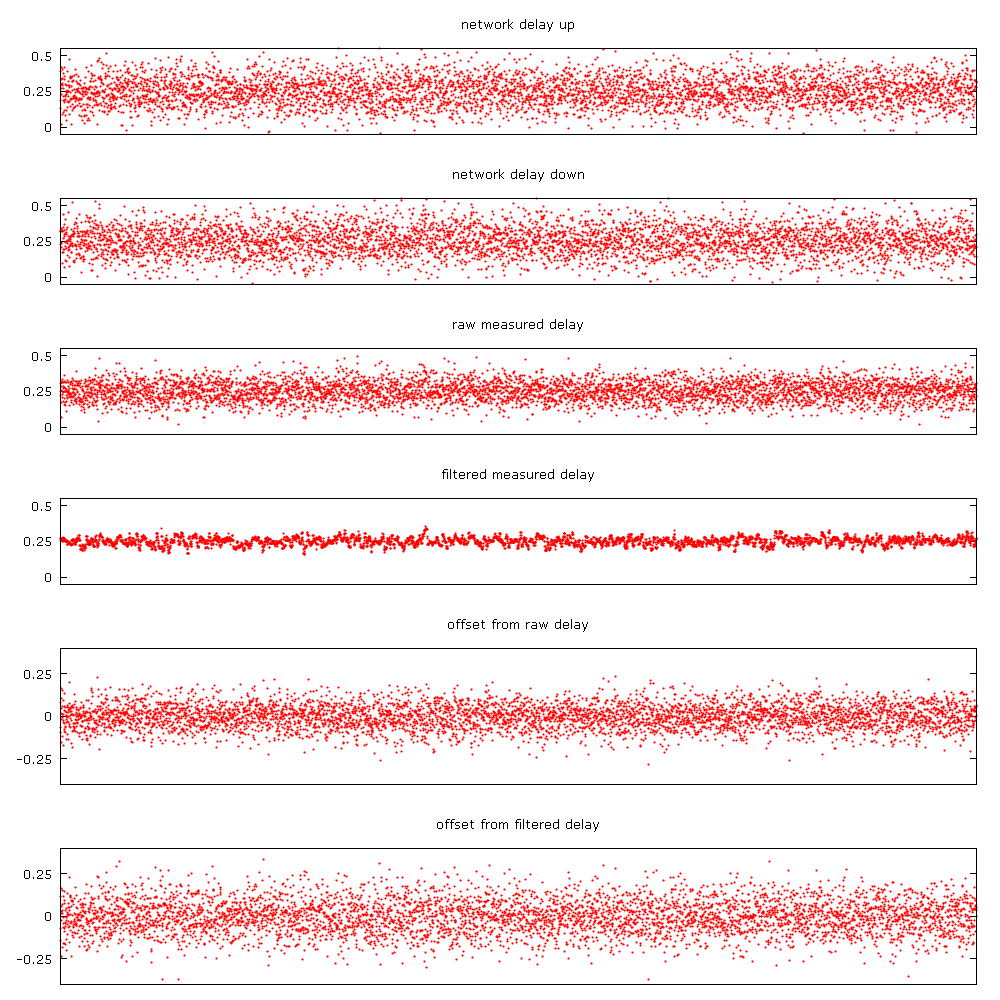
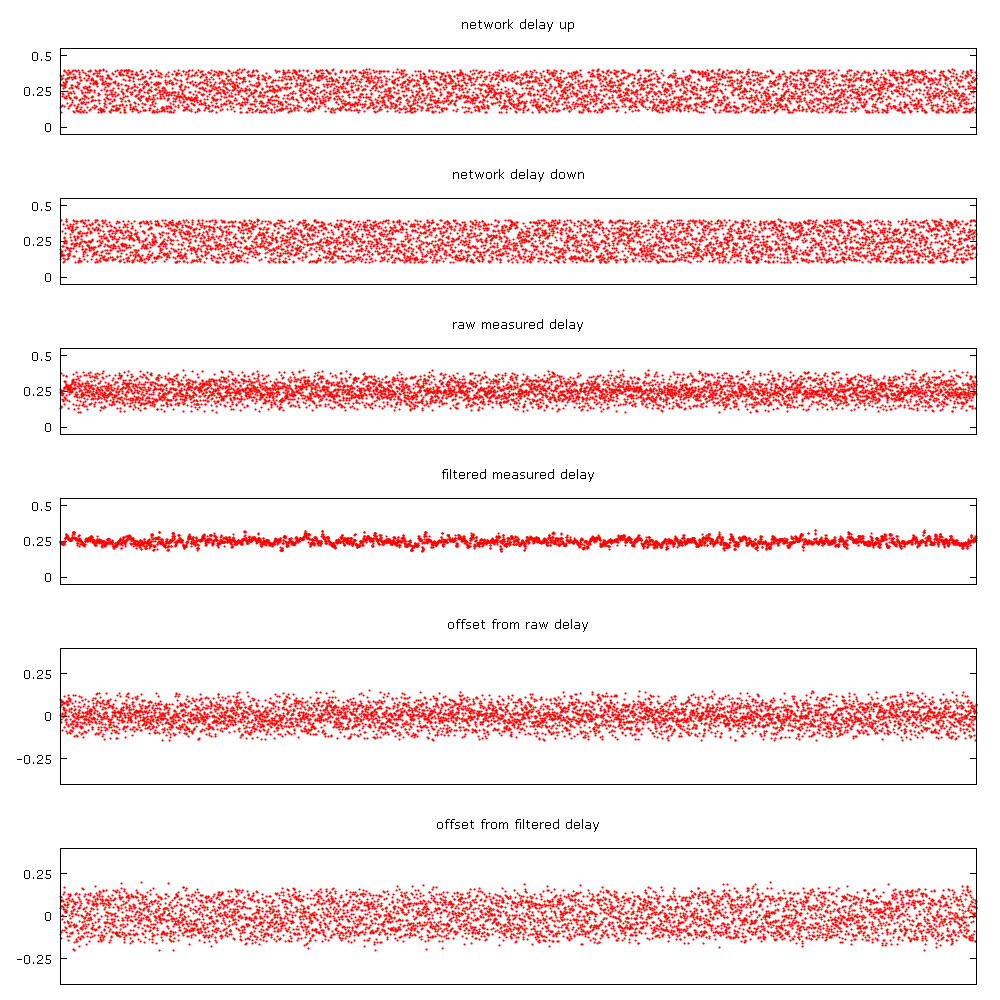
I prepared some graphs that I thought show why is this better. https://mlichvar.fedorapeople.org/tmp/ptp/ptpdelay_exponential.png https://mlichvar.fedorapeople.org/tmp/ptp/ptpdelay_normal.png https://mlichvar.fedorapeople.org/tmp/ptp/ptpdelay_uniform.png Each image (using a different delay distribution) includes graphs of the actual network delay in both directions, delay as measured by the slave, filtered delay (median with 10 samples), offset using the measured delay and offset using the filtered delay. I think the difference is clearly visible. With exponential distribution you can also see how the asymmetry in the delay distribution is included in the filtered offset. The scripts I used to generate and plot the data in case you want to play with it are here. https://mlichvar.fedorapeople.org/tmp/ptp/ptpdelay.tar.gz -- Miroslav Lichvar ------------------------------------------------------------------------------ Dive into the World of Parallel Programming The Go Parallel Website, sponsored by Intel and developed in partnership with Slashdot Media, is your hub for all things parallel software development, from weekly thought leadership blogs to news, videos, case studies, tutorials and more. Take a look and join the conversation now. http://goparallel.sourceforge.net/ _______________________________________________ Linuxptp-devel mailing list [email protected] https://lists.sourceforge.net/lists/listinfo/linuxptp-devel
{kind=link}
{kind=link}
{kind=link}