On Mon, Mar 09, 2015 at 08:36:43PM +0100, Richard Cochran wrote: > The really interesting comparision would be the actual offset after > PI servo control. I am looking to compare the result of your patch > set on a small but real network...
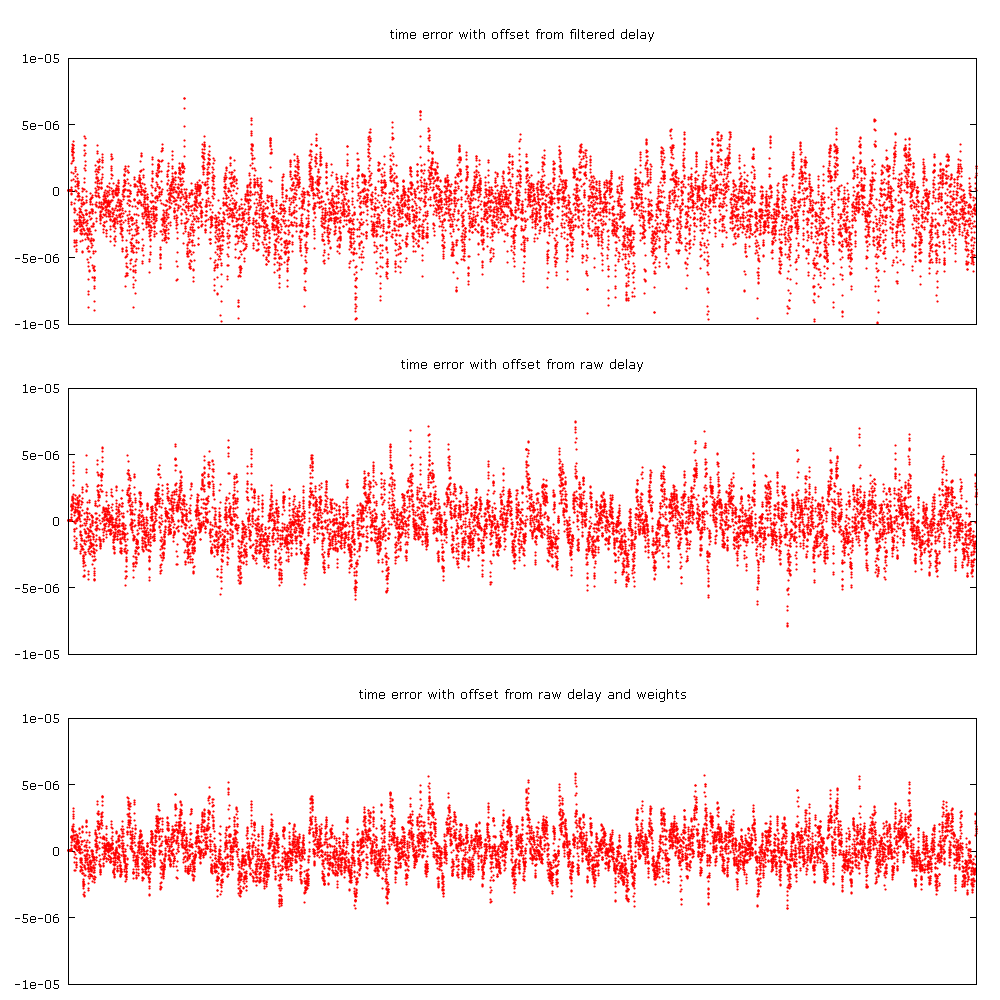
Ok. To give you an idea what difference you can expect with raw delay/offset and weights, here are graphs from a simulation with 10us jitter and default PI constants with SW timestamping. https://mlichvar.fedorapeople.org/tmp/ptp/ptp4l_error.png The RMS time error improved from 2.71 us to 1.85 us and 1.46 us. The RMS frequency error improved from 1.08 ppm to 0.73 ppm and 0.53 ppm. -- Miroslav Lichvar ------------------------------------------------------------------------------ Dive into the World of Parallel Programming The Go Parallel Website, sponsored by Intel and developed in partnership with Slashdot Media, is your hub for all things parallel software development, from weekly thought leadership blogs to news, videos, case studies, tutorials and more. Take a look and join the conversation now. http://goparallel.sourceforge.net/ _______________________________________________ Linuxptp-devel mailing list [email protected] https://lists.sourceforge.net/lists/listinfo/linuxptp-devel
{kind=link}