On Saturday 01 December 2007, Klemen Dovrtel wrote:
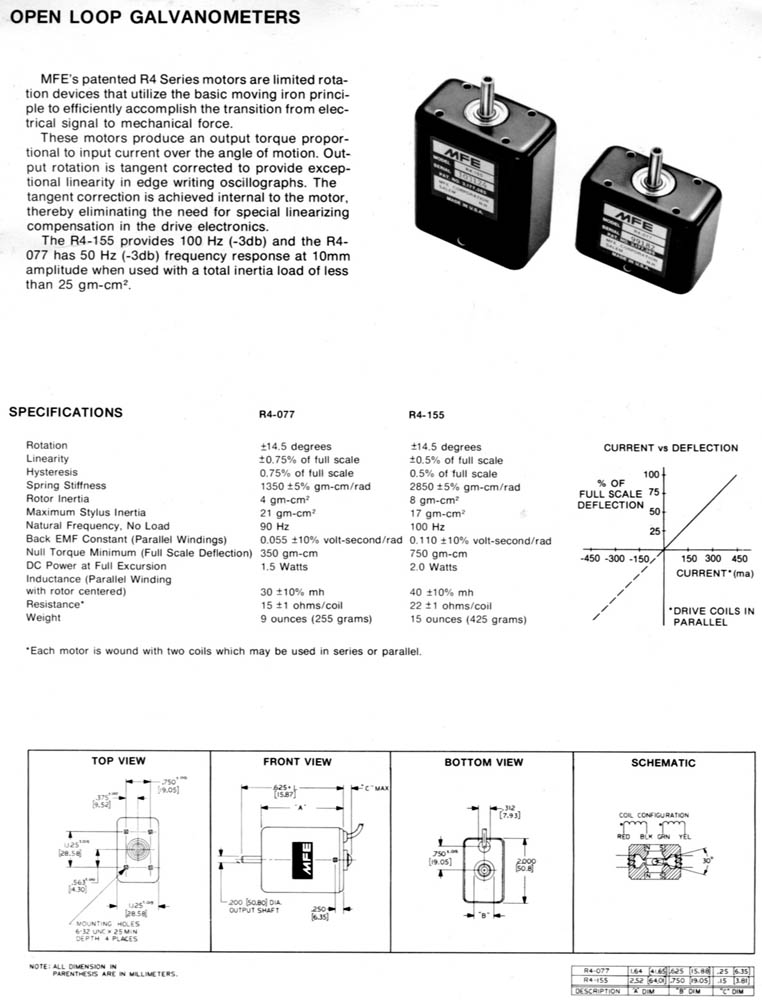
>I have two open loop galvanometers (
>http://www.laserfx.com/Backstage.LaserFX.com/Systems/Pinouts/MFEdataLG.jpg
>) which i would like to use emc controlled laser show
>(similar to this one:
>http://elm-chan.org/works/vlp/report_e.html ).
>
>I will use a hardware encoder for measuring the angle
>of galvanometer. I will configure hal using
>hal-encoder and hal-pid. I think i will manage to do
>this (i checked the etch-servo sample configuration).
>
>The galvanometer is current driven, so i was thinking
>of using a op-amp and R-2R resistor ladder for current
>source. So i need a 10 bit digital output for R-2R
>resistor ladder (instead of pwm used in etch-servo
>sample configuration). How can i archive this? Is this
>a good solution, or should i also use PWM (i didn't
>make the hardware driver yet).
>
Right here, I'd change the thinking, rather than a fancy resistor ladder, and
suffering from the slow ballistics of the galvanometer, if you know where it
is by the feedback, use the servo gain to horse it to where its supposed to
be as you can sweep it from point to point many times faster that way, and
probably with much less overshoot than a free swing at x current can ever do.
The idea is that you drive it with 10x its rated current, but just for about
1/2 the time it would take to move, and drive it in reverse just as hard to
stop it at the target point, then hold it in that position with the servo
feedback at its normal current until its time to make the next move. One can
also move it at slower speeds, with that speed totally under control if the
feedback is fine grained enough. One can mix the back emf of its velocity
with the feedback and get pretty smooth motions down to the stop, but the
stop would always be at an encoder count, not completely analog. But then
neither is the r2r idea.
For drawing figures, I'd think a smoother, constant speed motion would be more
desirable than a constellation of fixed points, the number determined by the
resolution of the encoder.
This might take a while to work out for the desired effect. And there are
smarter folks than me here on this list for suggestions as to how to make it
real. I use steppers, so actual servo theory I'd need help with, but the
knowledge is here on this list.
>My second problem is, that I think the position signal
>from emc should be modified a bit (
>height_on_the_wall=constant*tangens(emc_output signal
>), because otherwise the "drawing" on the wall will be
>stretched at the sides. How can i achieve this?
EMC can do the trig stuff just fine. To micron accuracies if need be.
>Regards
>Klemen
--
Cheers, Gene
"There are four boxes to be used in defense of liberty:
soap, ballot, jury, and ammo. Please use in that order."
-Ed Howdershelt (Author)
The worst sin towards our fellow creatures is not to hate them,
but to be indifferent to them; that's the essence of inhumanity.
-- G.B. Shaw
-------------------------------------------------------------------------
SF.Net email is sponsored by: The Future of Linux Business White Paper
from Novell. From the desktop to the data center, Linux is going
mainstream. Let it simplify your IT future.
http://altfarm.mediaplex.com/ad/ck/8857-50307-18918-4
_______________________________________________
Emc-users mailing list
[email protected]
https://lists.sourceforge.net/lists/listinfo/emc-users
{kind=link}