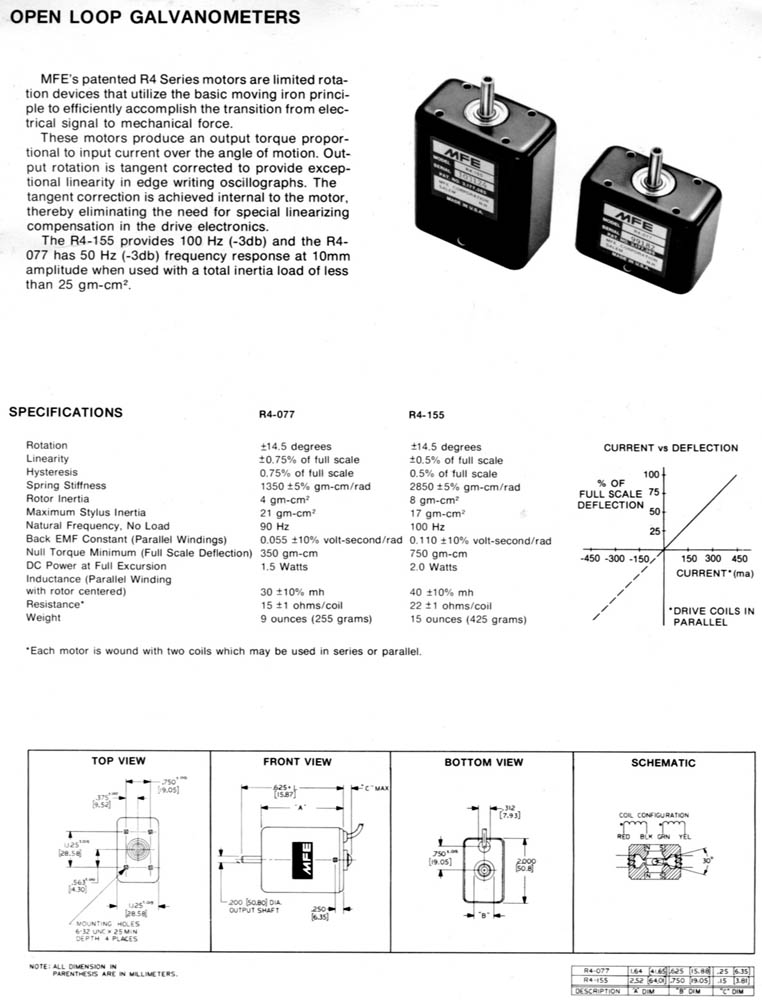
Peter C. Wallace wrote: > On Sat, 1 Dec 2007, Gene Heskett wrote: > > >>Date: Sat, 01 Dec 2007 12:46:21 -0500 >>From: Gene Heskett <[EMAIL PROTECTED]> >>Reply-To: "Enhanced Machine Controller (EMC)" >> <[email protected]> >>To: "Enhanced Machine Controller (EMC)" <[email protected]> >>Subject: Re: [Emc-users] open loop galvanometer control >> >>On Saturday 01 December 2007, Klemen Dovrtel wrote: >> >>>I have two open loop galvanometers ( >>>http://www.laserfx.com/Backstage.LaserFX.com/Systems/Pinouts/MFEdataLG.jpg >>>) which i would like to use emc controlled laser show >>>(similar to this one: >>>http://elm-chan.org/works/vlp/report_e.html ). >>> >>>I will use a hardware encoder for measuring the angle >>>of galvanometer. I will configure hal using >>>hal-encoder and hal-pid. I think i will manage to do >>>this (i checked the etch-servo sample configuration). >>> >>>The galvanometer is current driven, so i was thinking >>>of using a op-amp and R-2R resistor ladder for current >>>source. So i need a 10 bit digital output for R-2R >>>resistor ladder (instead of pwm used in etch-servo >>>sample configuration). How can i archive this? Is this >>>a good solution, or should i also use PWM (i didn't >>>make the hardware driver yet). >>> >> >>Right here, I'd change the thinking, rather than a fancy resistor ladder, and >>suffering from the slow ballistics of the galvanometer, if you know where it >>is by the feedback, use the servo gain to horse it to where its supposed to >>be as you can sweep it from point to point many times faster that way, and >>probably with much less overshoot than a free swing at x current can ever do. >> >>The idea is that you drive it with 10x its rated current, but just for about >>1/2 the time it would take to move, and drive it in reverse just as hard to >>stop it at the target point, then hold it in that position with the servo >>feedback at its normal current until its time to make the next move. One can >>also move it at slower speeds, with that speed totally under control if the >>feedback is fine grained enough. One can mix the back emf of its velocity >>with the feedback and get pretty smooth motions down to the stop, but the >>stop would always be at an encoder count, not completely analog. But then >>neither is the r2r idea. > > > Thats pretty much just what Accelleration feed forward does. Dont know what > its called in EMC, FF2? Yes. First, I'm having some trouble figuring out how you can attach an encoder to a galvanometer mirror which weighs just a gram or so. Building your own R-2R ladder is an excercise in frustration, as the pro's do it with matched sets of 0.1% resistors. Why not buy a complete 10- or 12-bit monolithic DAC that costs less than 2 0.1% resistors?
{kind=link}
I don't see how EMC2 can handle this drawing task from G-code at the rates required. To draw even simple images, it would be the equivalent of running a 100 block part program 20 times over in one second (or more). Maybe you could hack up something with EMC to precompute the trajectories and then pass it to a stripped-down motion planner that gets rid of the interpolation to try to get the rate up. I'm still REAL dubious. You'd probably need to get the servo loop running at 100 KHz or something to even get close. I'm not sure what level of performance the original poster was looking for. Jon ------------------------------------------------------------------------- SF.Net email is sponsored by: The Future of Linux Business White Paper from Novell. From the desktop to the data center, Linux is going mainstream. Let it simplify your IT future. http://altfarm.mediaplex.com/ad/ck/8857-50307-18918-4 _______________________________________________ Emc-users mailing list [email protected] https://lists.sourceforge.net/lists/listinfo/emc-users