On Sat, 1 Dec 2007, Gene Heskett wrote:
> Date: Sat, 01 Dec 2007 12:46:21 -0500
> From: Gene Heskett <[EMAIL PROTECTED]>
> Reply-To: "Enhanced Machine Controller (EMC)"
> <[email protected]>
> To: "Enhanced Machine Controller (EMC)" <[email protected]>
> Subject: Re: [Emc-users] open loop galvanometer control
>
> On Saturday 01 December 2007, Klemen Dovrtel wrote:
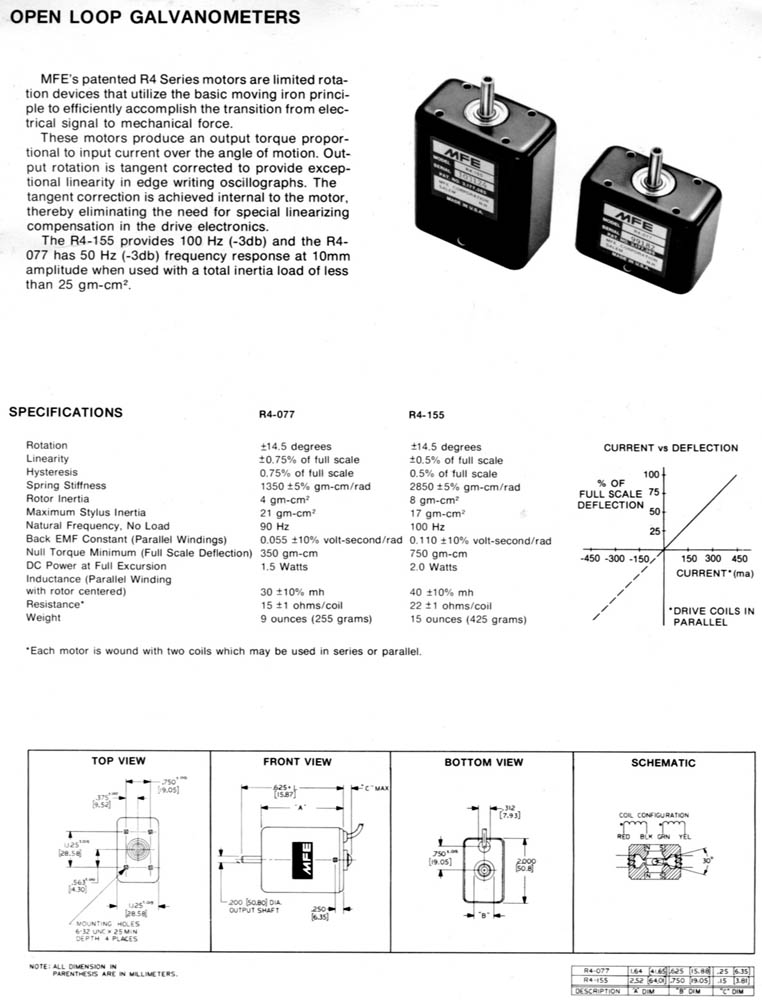
>> I have two open loop galvanometers (
>> http://www.laserfx.com/Backstage.LaserFX.com/Systems/Pinouts/MFEdataLG.jpg
>> ) which i would like to use emc controlled laser show
>> (similar to this one:
>> http://elm-chan.org/works/vlp/report_e.html ).
>>
>> I will use a hardware encoder for measuring the angle
>> of galvanometer. I will configure hal using
>> hal-encoder and hal-pid. I think i will manage to do
>> this (i checked the etch-servo sample configuration).
>>
>> The galvanometer is current driven, so i was thinking
>> of using a op-amp and R-2R resistor ladder for current
>> source. So i need a 10 bit digital output for R-2R
>> resistor ladder (instead of pwm used in etch-servo
>> sample configuration). How can i archive this? Is this
>> a good solution, or should i also use PWM (i didn't
>> make the hardware driver yet).
>>
> Right here, I'd change the thinking, rather than a fancy resistor ladder, and
> suffering from the slow ballistics of the galvanometer, if you know where it
> is by the feedback, use the servo gain to horse it to where its supposed to
> be as you can sweep it from point to point many times faster that way, and
> probably with much less overshoot than a free swing at x current can ever do.
>
> The idea is that you drive it with 10x its rated current, but just for about
> 1/2 the time it would take to move, and drive it in reverse just as hard to
> stop it at the target point, then hold it in that position with the servo
> feedback at its normal current until its time to make the next move. One can
> also move it at slower speeds, with that speed totally under control if the
> feedback is fine grained enough. One can mix the back emf of its velocity
> with the feedback and get pretty smooth motions down to the stop, but the
> stop would always be at an encoder count, not completely analog. But then
> neither is the r2r idea.
Thats pretty much just what Accelleration feed forward does. Dont know what
its called in EMC, FF2?
Peter Wallace
Mesa Electronics
(\__/)
(='.'=) This is Bunny. Copy and paste bunny into your
(")_(") signature to help him gain world domination.
-------------------------------------------------------------------------
SF.Net email is sponsored by: The Future of Linux Business White Paper
from Novell. From the desktop to the data center, Linux is going
mainstream. Let it simplify your IT future.
http://altfarm.mediaplex.com/ad/ck/8857-50307-18918-4
_______________________________________________
Emc-users mailing list
[email protected]
https://lists.sourceforge.net/lists/listinfo/emc-users
{kind=link}